

Question: Consider a pendulum as shown in Fig. 1 . We assume that the mass m is concentrated at pendulum end, with length as l .
Consider a pendulum as shown in Fig. We assume that the mass is concentrated at pendulum end,
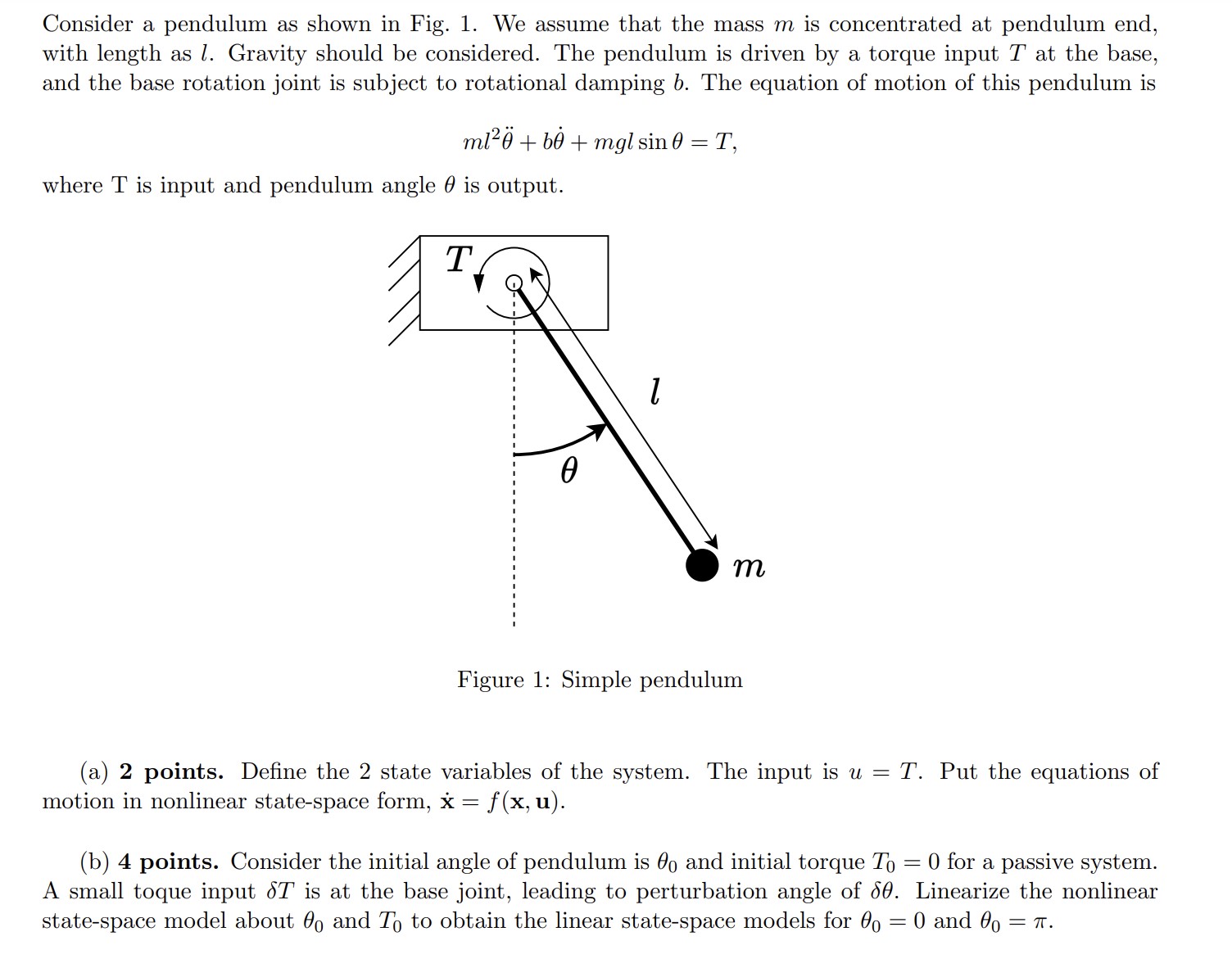
with length as Gravity should be considered. The pendulum is driven by a torque input at the base,
and the base rotation joint is subject to rotational damping The equation of motion of this pendulum is
mglsin
where T is input and pendulum angle is output.
Figure : Simple pendulum
a points. Define the state variables of the system. The input is Put the equations of
motion in nonlinear statespace form,
b points. Consider the initial angle of pendulum is and initial torque for a passive system.
A small toque input is at the base joint, leading to perturbation angle of Linearize the nonlinear
statespace model about and to obtain the linear statespace models for and
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock