

Question: = Consider a system described by i(t) = [6 1 10) + [1 ] u(e) + u{t), y(t) = [1 u(t) + wt), y(t) =
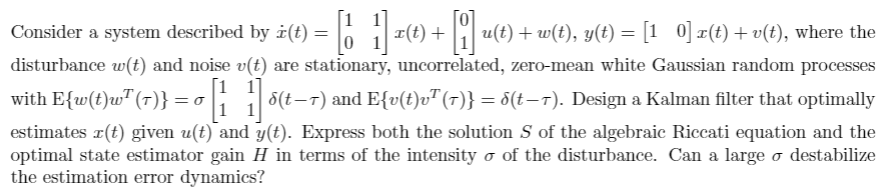
= Consider a system described by i(t) = [6 1 10) + [1 ] u(e) + u{t), y(t) = [1 u(t) + wt), y(t) = [1 0] r(t) + y(t), where the disturbance wt) and noise v(t) are stationary, uncorrelated, zero-mean white Gaussian random processes with E{w(t)wt (7)}=0 } [1 E(} . 5(t-1) and E{v(t)vt ()} = 5(t-T). Design a Kalman filter that optimally estimates r(t) given u(t) and y(t). Express both the solution S of the algebraic Riccati equation and the optimal state estimator gain H in terms of the intensity o of the disturbance. Can a large o destabilize the estimation error dynamics? = Consider a system described by i(t) = [6 1 10) + [1 ] u(e) + u{t), y(t) = [1 u(t) + wt), y(t) = [1 0] r(t) + y(t), where the disturbance wt) and noise v(t) are stationary, uncorrelated, zero-mean white Gaussian random processes with E{w(t)wt (7)}=0 } [1 E(} . 5(t-1) and E{v(t)vt ()} = 5(t-T). Design a Kalman filter that optimally estimates r(t) given u(t) and y(t). Express both the solution S of the algebraic Riccati equation and the optimal state estimator gain H in terms of the intensity o of the disturbance. Can a large o destabilize the estimation error dynamics
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts