

Question: Consider an actuated rotating rigid body. The model equations are as follows: == W = a123 +21 = (2) W3=a3w1w2. Here the constants a1,
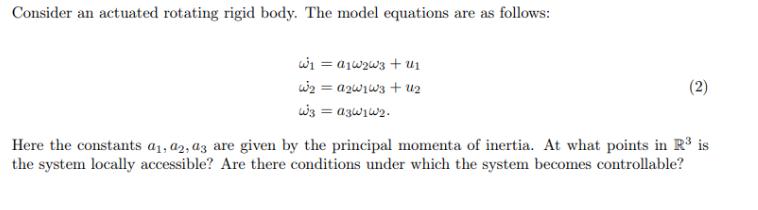
Consider an actuated rotating rigid body. The model equations are as follows: == W = a123 +21 = (2) W3=a3w1w2. Here the constants a1, a2, a3 are given by the principal momenta of inertia. At what points in R is the system locally accessible? Are there conditions under which the system becomes controllable?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock