

Question: Consider the 3R anthropomorphic robot manipulator with a trunk/shoulder offset shown in Fig. 1. The DH parameters are given in Tab. 1, where a1, a2,
Consider the 3R anthropomorphic robot manipulator with a trunk/shoulder offset shown in Fig. 1. The DH parameters are given in Tab. 1, where a1, a2, a3, and d1 are all strictly positive.
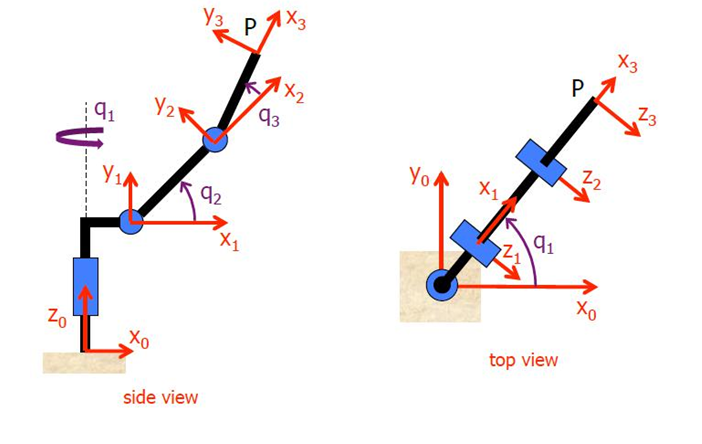
We are interested only in the position p of point P, i.e., the origin of frame 3 attached to the robot end-e_ector. The direct kinematics is computed as
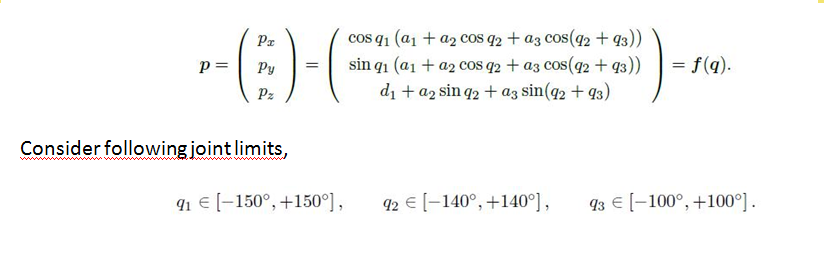
and kinematic parameters,
d1 = 200cm; a1 = 30cm; a2 = 100cm; a3 = 80cm;
Using C# programming language,
Draw 3D workspace of robotic system, (every possible point in space that point P can go) [3D plot plot will contain dots representing the collection of all points of workspace of the robotic system given]
3 3 top view side view
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts