

Question: Consider the double integrator system: x = A x + B u , y = C x + D u ; A = [ 0
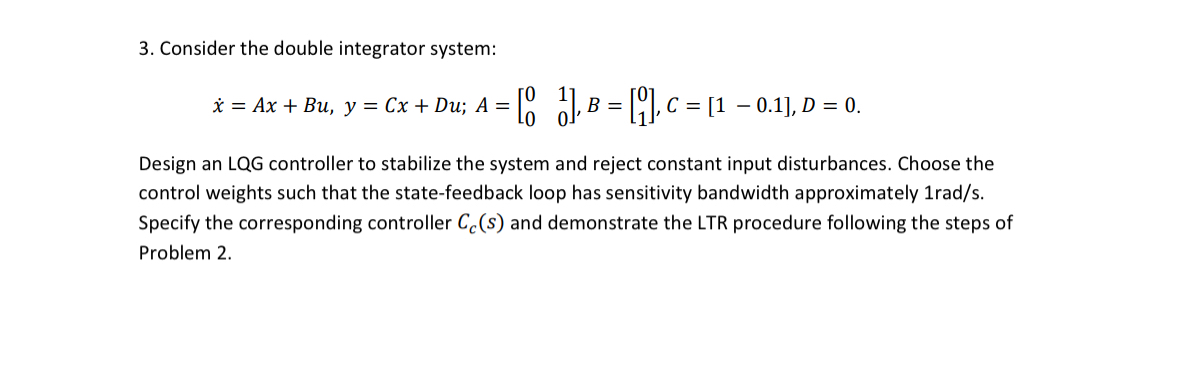
Consider the double integrator system:
;
Design an LQG controller to stabilize the system and reject constant input disturbances. Choose the control weights such that the statefeedback loop has sensitivity bandwidth approximately Specify the corresponding controller and demonstrate the LTR procedure following the steps of Problem
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock