

Question: Consider the drone robot shown on the right. Let's assume that R = Rg, R = R is given. (a) (10pts) Obtain the drone's
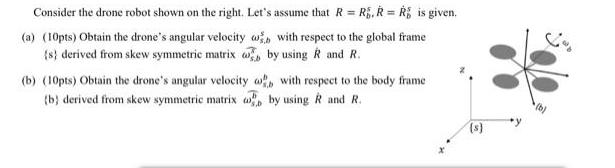
Consider the drone robot shown on the right. Let's assume that R = Rg, R = R is given. (a) (10pts) Obtain the drone's angular velocity w with respect to the global frame {s} derived from skew symmetric matrix by using R and R. (b) (10pts) Obtain the drone's angular velocity (b) derived from skew symmetric matrix with respect to the body frame by using R and R. (s)
Step by Step Solution
3.43 Rating (150 Votes )
There are 3 Steps involved in it
To obtain the drones angular velocity s with respect to the global frame s derived from skew symmetr... View full answer

Get step-by-step solutions from verified subject matter experts