

Question: Consider the following system, whose dynamics are described in state space by: [i] = -1 -101+14 y = x1. a) Suppose that you are tasked
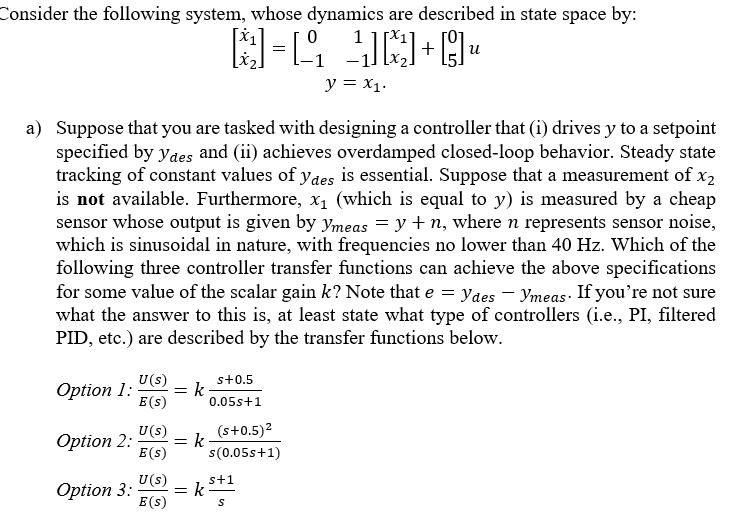
Consider the following system, whose dynamics are described in state space by: [i] = -1 -101+14 y = x1. a) Suppose that you are tasked with designing a controller that (i) drives y to a setpoint specified by Ydes and (ii) achieves overdamped closed-loop behavior. Steady state tracking of constant values of ydes is essential. Suppose that a measurement of x2 is not available. Furthermore, X1 (which is equal to y) is measured by a cheap sensor whose output is given by Ymeas = y +n, where n represents sensor noise, which is sinusoidal in nature, with frequencies no lower than 40 Hz. Which of the following three controller transfer functions can achieve the above specifications for some value of the scalar gain k? Note that e = ydes - Ymeas. If you're not sure what the answer to this is, at least state what type of controllers (i.e., PI, filtered PID, etc.) are described by the transfer functions below. Option 1. US_ 1. S+0.5 " E(S) 0.05s+1 Option 2: U(S= 1 (s+0.5)2 s(0.05s+1) Option 3: 169 = k $42 Consider the following system, whose dynamics are described in state space by: [i] = -1 -101+14 y = x1. a) Suppose that you are tasked with designing a controller that (i) drives y to a setpoint specified by Ydes and (ii) achieves overdamped closed-loop behavior. Steady state tracking of constant values of ydes is essential. Suppose that a measurement of x2 is not available. Furthermore, X1 (which is equal to y) is measured by a cheap sensor whose output is given by Ymeas = y +n, where n represents sensor noise, which is sinusoidal in nature, with frequencies no lower than 40 Hz. Which of the following three controller transfer functions can achieve the above specifications for some value of the scalar gain k? Note that e = ydes - Ymeas. If you're not sure what the answer to this is, at least state what type of controllers (i.e., PI, filtered PID, etc.) are described by the transfer functions below. Option 1. US_ 1. S+0.5 " E(S) 0.05s+1 Option 2: U(S= 1 (s+0.5)2 s(0.05s+1) Option 3: 169 = k $42
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts