

Question: Consider the following two - link planar RR manipulator that is controlled using a PD controller at Joint 1 . Joint 1 exhibits the following
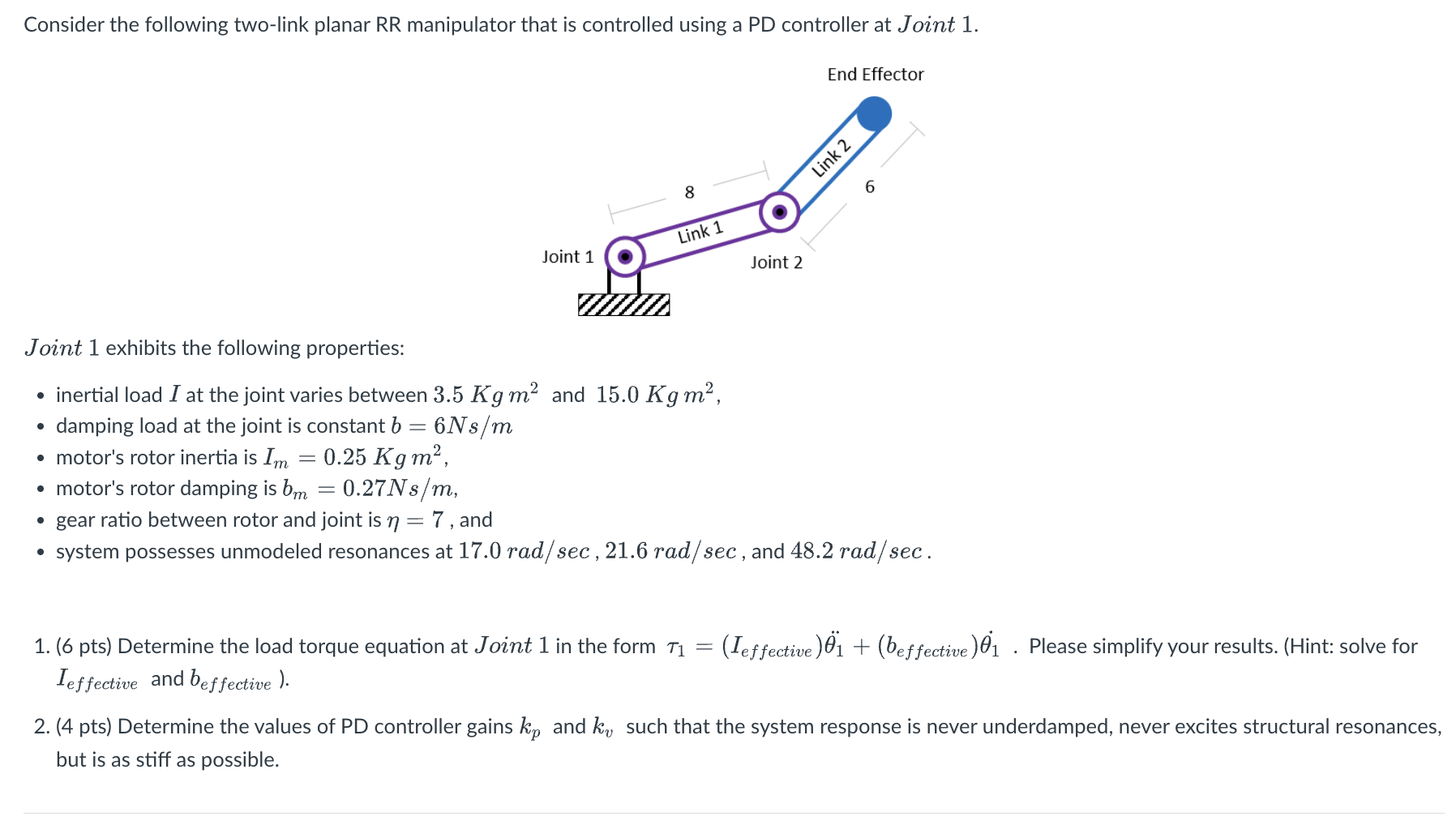
Consider the following twolink planar RR manipulator that is controlled using a PD controller at Joint
Joint exhibits the following properties:
inertial load I at the joint varies between Kgm and Kgm
damping load at the joint is constant bNsm
motor's rotor inertia is ImKgm
motor's rotor damping is bmNsm
gear ratio between rotor and joint is eta and
system possesses unmodeled resonances at radsecradsec and radsec
pts Determine the load torque equation at Joint in the form tau Ieffective theta beffective theta Ieffective and :beffective
pts Determine the values of PD controller gains kp and kv such that the system response is never underdamped, never excites structural resonances,
but is as stiff as possible.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock