

Question: Consider the following two - link planar RR manipulator. The manipulator begins at the starting configuration q s ( solid lines ) and must follow
Consider the following twolink planar RR manipulator.
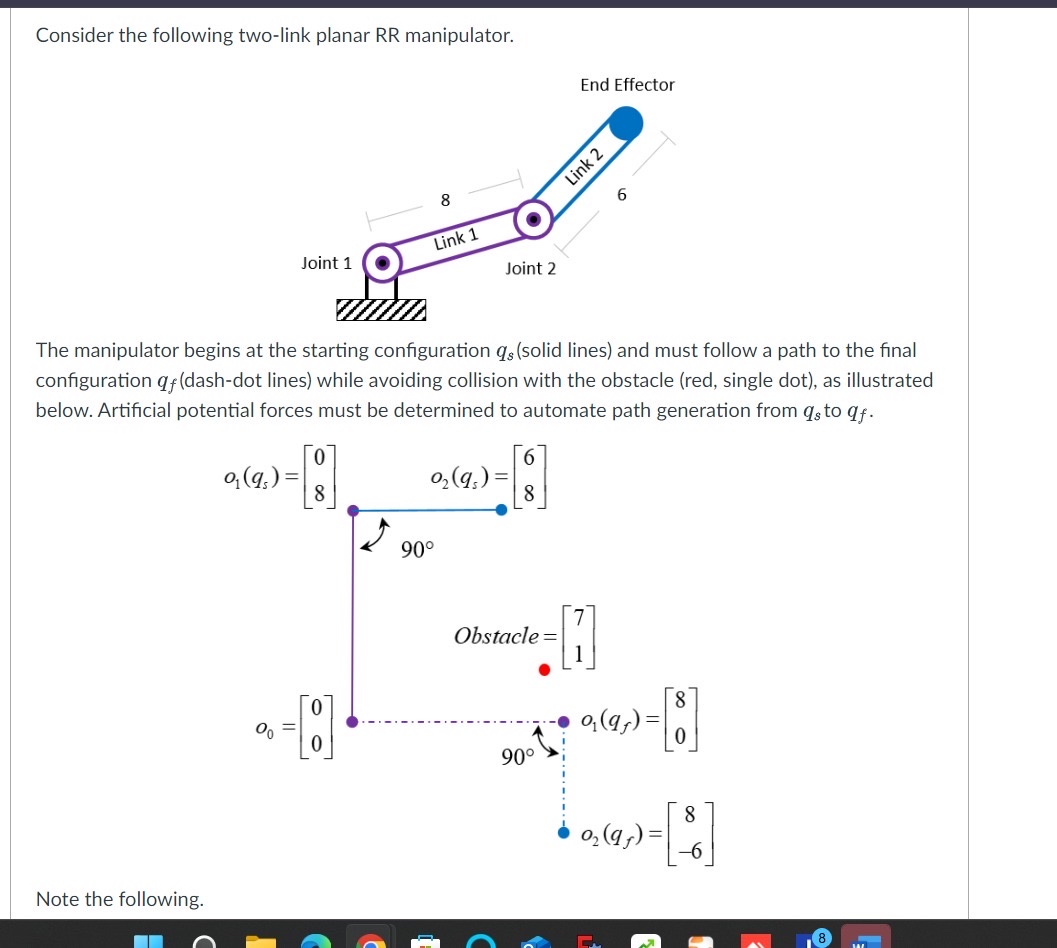
The manipulator begins at the starting configuration solid lines and must follow a path to the final configuration dashdot lines while avoiding collision with the obstacle red single dot as illustrated below. Artificial potential forces must be determined to automate path generation from to
Obstacle
Note the following.
Note the following.
DH origin and obstacle locations in the workspace are indicated in the figure,
to determine the sphere of influence for the obstacle,
and
the obstacle may be analyzed as a single point in the workspace.
pts Evaluate the attractive artificial potential forces acting at origin
pts Evaluate and specify whether origin and origin are within the obstacle's sphere of influence.
pts Evaluate the repulsive artificial potential forces acting at origin
Consider the following twolink planar RR manipulator.
The manipulator begins at the starting configuration solid lines and must follow a path to the final configuration dashdot lines while avoiding collision with the obstacle red single dot as illustrated below. Artificial potential forces must be determined to automate path generation from to
Obstacle
Note the following.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock