

Question: Consider the grid environment below. The robot is initially located at A , B , or C with equal probabilities, and the robot's goal is
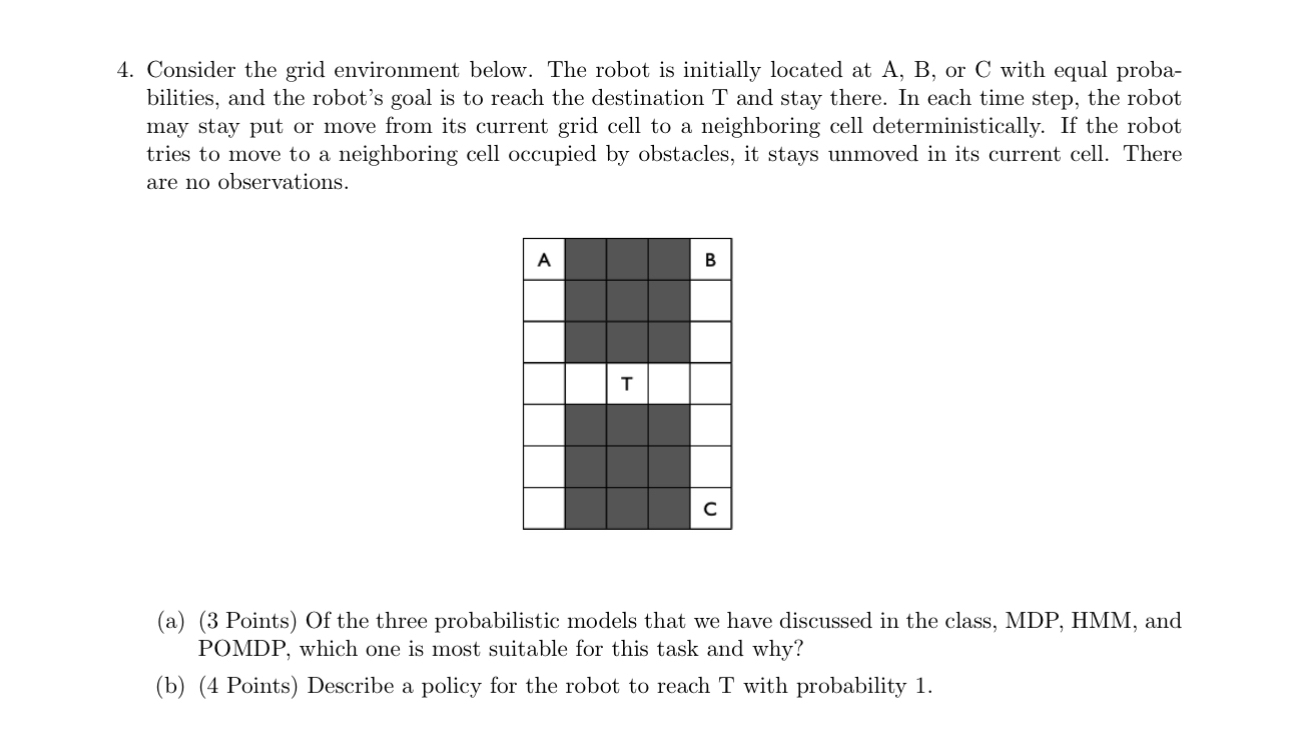
Consider the grid environment below. The robot is initially located at or C with equal probabilities, and the robot's goal is to reach the destination T and stay there. In each time step, the robot may stay put or move from its current grid cell to a neighboring cell deterministically. If the robot tries to move to a neighboring cell occupied by obstacles, it stays unmoved in its current cell. There are no observations.
a Points Of the three probabilistic models that we have discussed in the class, MDP HMM, and POMDP, which one is most suitable for this task and why?
b Points Describe a policy for the robot to reach T with probability
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock