

Question: Consider the H ^ ( MM ) chnimen holnin, The prior probability P ( x _ ( 0 ) ) , dynamics model P (
Consider the HMM chnimen holnin,
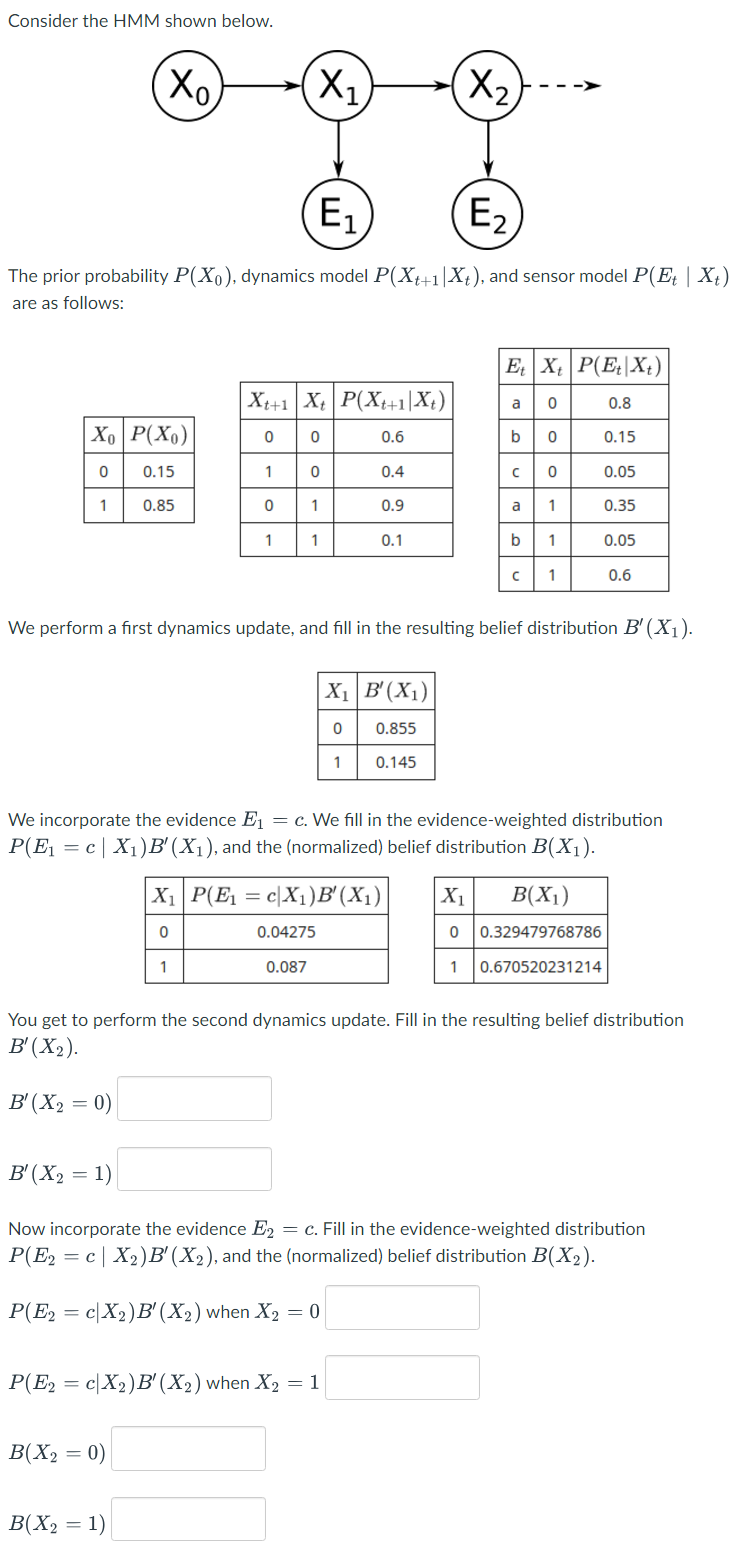
The prior probability Px dynamics model Pxtxt and sensor model PEtxt
are as follows:
We perform a first dynamics update, and fill in the resulting belief distribution Bx
We incorporate the evidence Ec We fill in the evidenceweighted distribution
PEcxBx and the normalized belief distribution Bx
You get to perform the second dynamics update. Fill in the resulting belief distribution
Bx
Bx
Bx
Now incorporate the evidence Ec Fill in the evidenceweighted distribution
PEcxBx and the normalized belief distribution Bx
PEcxBx when x
PEcxBx when x
Bx
Bx
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock