

Question: Consider the PR robot as follows. The coordinate frames are defined as shown. For link 1, its mass is m. For link 2, its
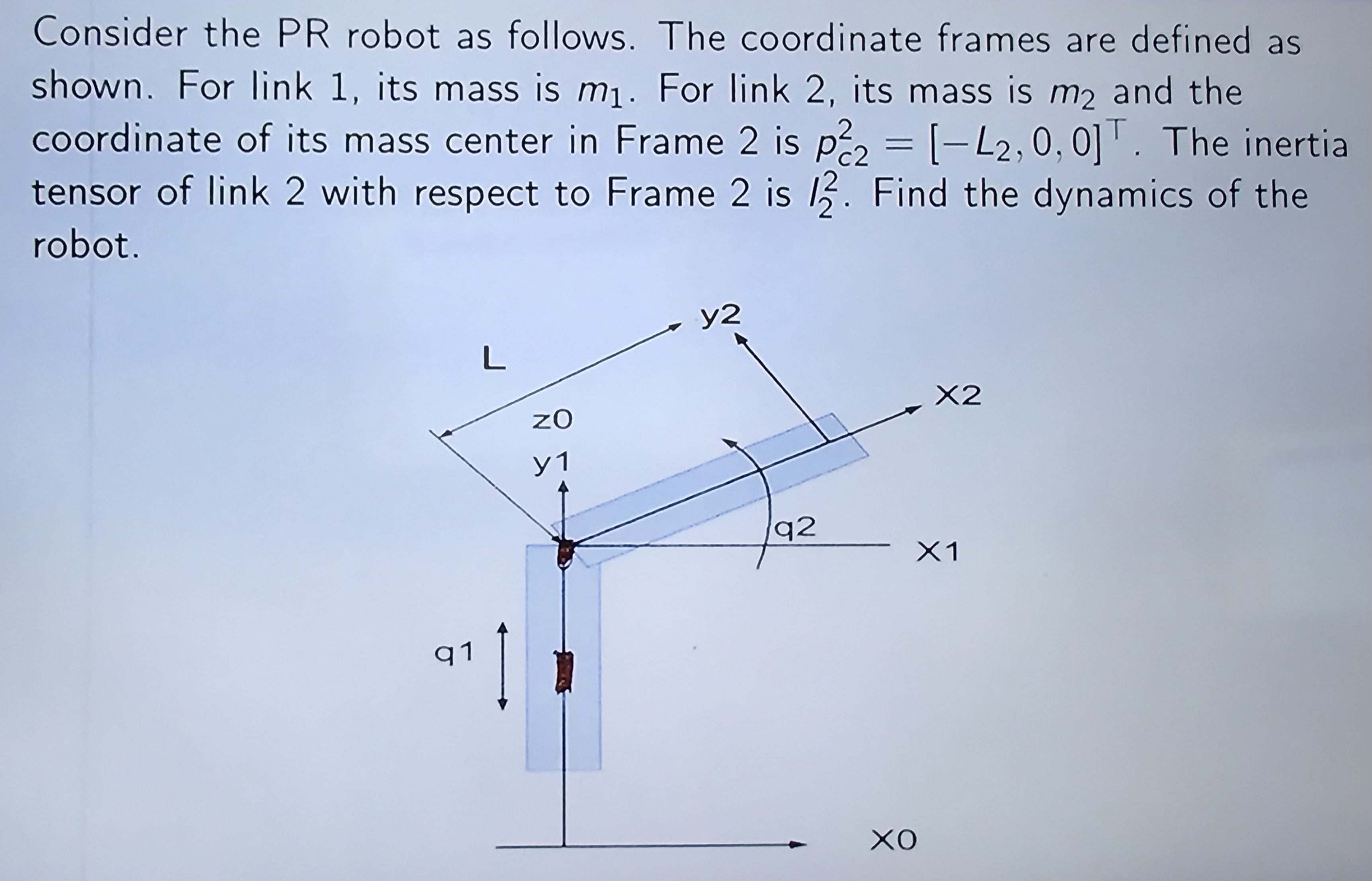
Consider the PR robot as follows. The coordinate frames are defined as shown. For link 1, its mass is m. For link 2, its mass is m and the coordinate of its mass center in Frame 2 is p = [-L2, 0, 0] T. The inertia tensor of link 2 with respect to Frame 2 is 12. Find the dynamics of the robot. y2 c2 91 L zo y1 X2 42 X1
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Solutions Step 1 To derive the equations of motion for the given twolink robot we can use the Lagran... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock