

Question: Controller Designing Design LQR controller to stabilize the system around equilibrium position. Show all the designing steps and use MATLAB/Octave to design it. Write a
 Controller Designing Design LQR controller to stabilize the system around equilibrium position. Show all the designing steps and use MATLAB/Octave to design it. Write a MATLAB/Octaver code to simulate the behavior of the system with LQR controller.
Controller Designing Design LQR controller to stabilize the system around equilibrium position. Show all the designing steps and use MATLAB/Octave to design it. Write a MATLAB/Octaver code to simulate the behavior of the system with LQR controller.
If you answer me in 1 to 2 hours i will rate you high handwritten not required Thanks...
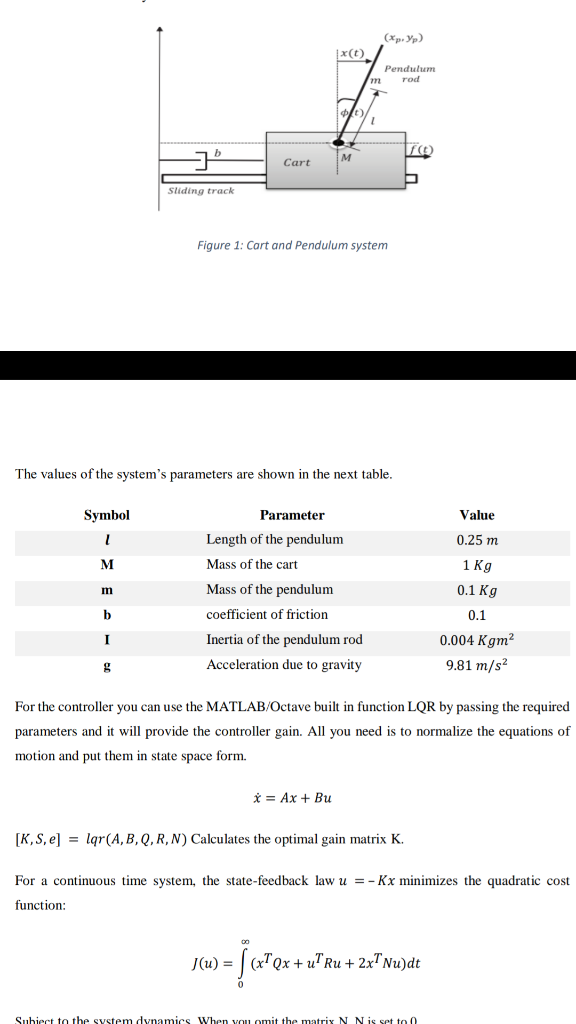
(xpryp) X(t) Pendulum rod fo M Cart Sliding track Figure 1: Cart and Pendulum system The values of the system's parameters are shown in the next table. Value Symbol 1 M 0.25 m Parameter Length of the pendulum Mass of the cart Mass of the pendulum 1 Kg m 0.1 Kg b coefficient of friction I Inertia of the pendulum rod Acceleration due to gravity 0.1 0.004 Kgm? 9.81 m/s For the controller you can use the MATLAB/Octave built in function LQR by passing the required parameters and it will provide the controller gain. All you need is to normalize the equations of motion and put them in state space form. i = Ax + Bu [K,S, e) = lqr(A, B, Q, R,N) Calculates the optimal gain matrix K. For a continuous time system, the state-feedback law u =-Kx minimizes the quadratic cost function: (x+ Qx + UT Ru + 2xT Nudt Subiect to the system dynamics When you omit the matrix N N is set to o
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts