

Question: Convert the following program from machine language into ARM Assembly language. The numbers on the left are the instruction addresses in the memory and
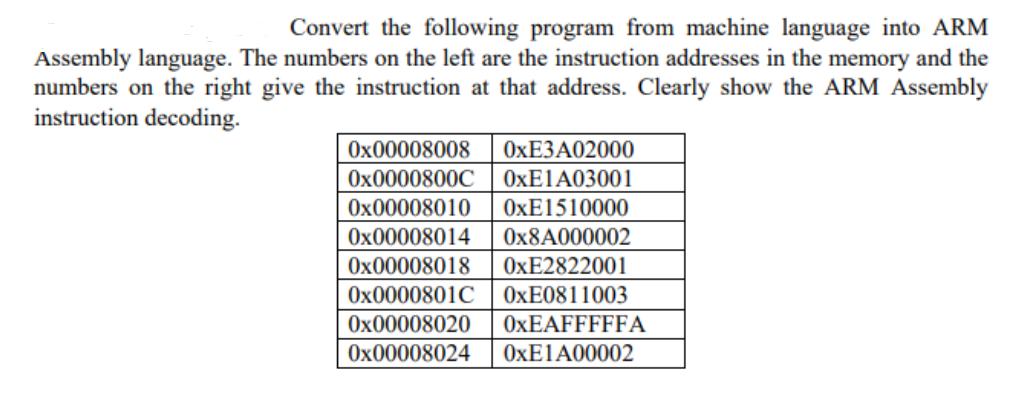
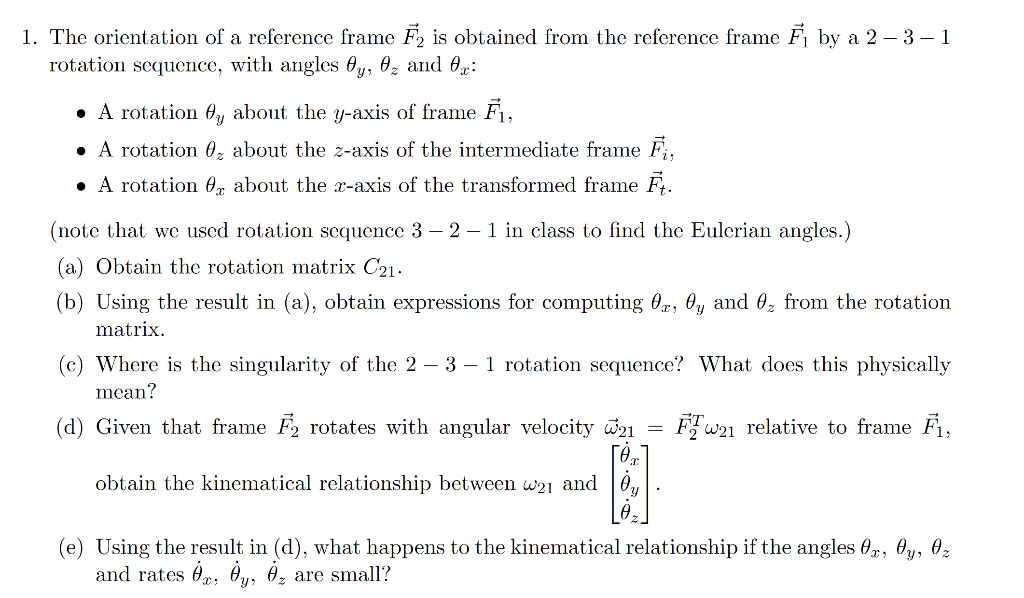
Convert the following program from machine language into ARM Assembly language. The numbers on the left are the instruction addresses in the memory and the numbers on the right give the instruction at that address. Clearly show the ARM Assembly instruction decoding. 0x00008008 OxE3A02000 0x0000800C OxE1A03001 0x00008010 0xE1510000 0x00008014 0x8A000002 0x00008018 OxE2822001 0x0000801C 0xE0811003 0x00008020 OxEAFFFFFA 0x00008024 OxE1A00002 1. The orientation of a reference frame F2 is obtained from the reference frame F by a 2-3-1 rotation sequence, with angles y, z and 0: A rotation y about the y-axis of frame F, A rotation about the z-axis of the intermediate frame Fi, A rotation about the x-axis of the transformed frame Ft. (note that we used rotation sequence 3-2-1 in class to find the Eulerian angles.) (a) Obtain the rotation matrix C21. (b) Using the result in (a), obtain expressions for computing 0, y and 0 from the rotation matrix. (c) Where is the singularity of the 2 3 1 rotation sequence? What does this physically mean? Fw21 relative to frame F1, (d) Given that frame F2 rotates with angular velocity 21 = obtain the kinematical relationship between w21 and (e) Using the result in (d), what happens to the kinematical relationship if the angles Ox, Oy, Oz and rates 0,8y, z are small?
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts