

Question: EXAMPLE 3 . 3 Figure 3 . 6 ( a ) shows a three - link planar arm. Because all three joints are revolute, this
EXAMPLE
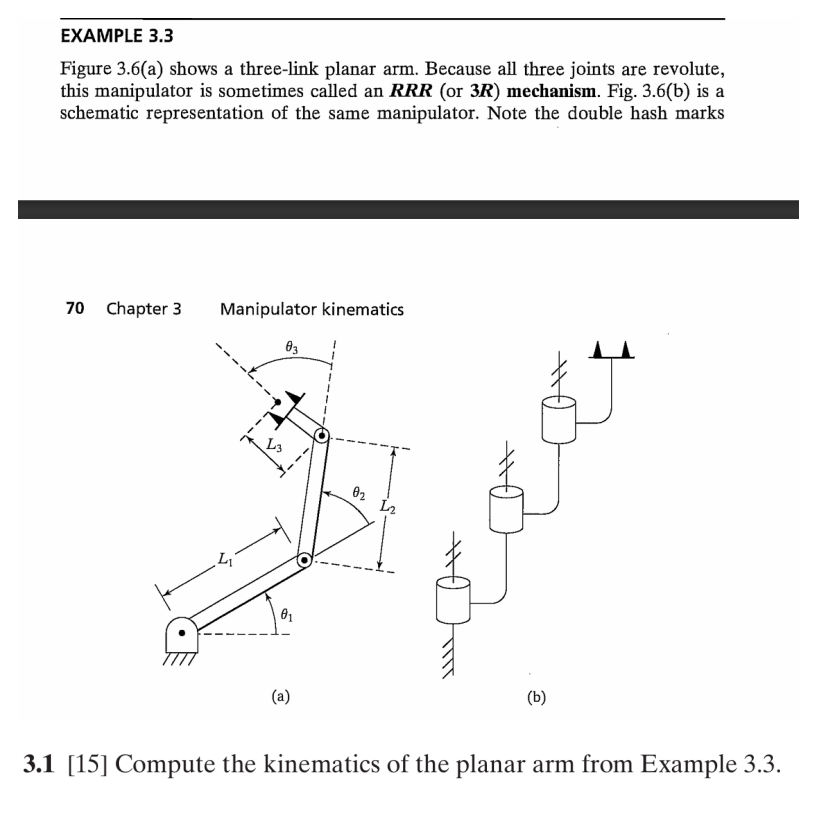
Figure a shows a threelink planar arm. Because all three joints are revolute,
this manipulator is sometimes called an or mechanism. Fig. b is a
schematic representation of the same manipulator. Note the double hash marks
Chapter Manipulator kinematics
a
b
Compute the kinematics of the planar arm from Example
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock