

Question: EXECUTION: The execution of each step should be demonstrated in ROS Stage and the nodes should be written in Python. You can create a seperate
EXECUTION:
The execution of each step should be demonstrated in ROS Stage and the nodes should be written in Python.
You can create a seperate Python node for each robot that executes step A Or you can create a single Python
node that executes step A for both robots. You need to have a separate Python nodes for steps B and C
You can start running your nodes either using rosrun command or using roslaunch command by creating
launch files.
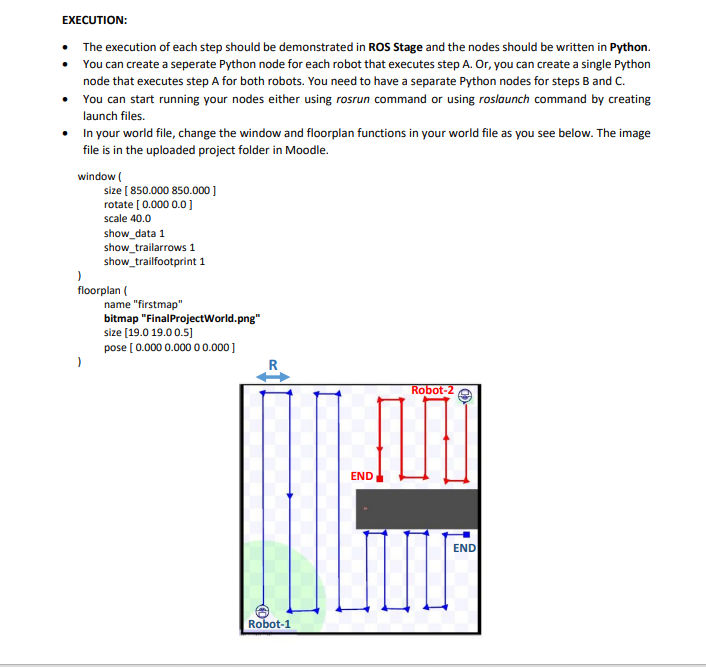
In your world file, change the window and floorplan functions in your world file as you see below. The image
file is in the uploaded project folder in Moodle.
window
size
rotate
scale
showdata
showtrailarrows
showtrailfootprint
floorplan
name "firstmap"
bitmap "FinalProjectWorld.png
size
pose
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock