

Question: Exercise 2.26 The tip coordinates for the two-link planar 2R robot of Fig- ure 2.33 are given by x = 2 cos 01 +
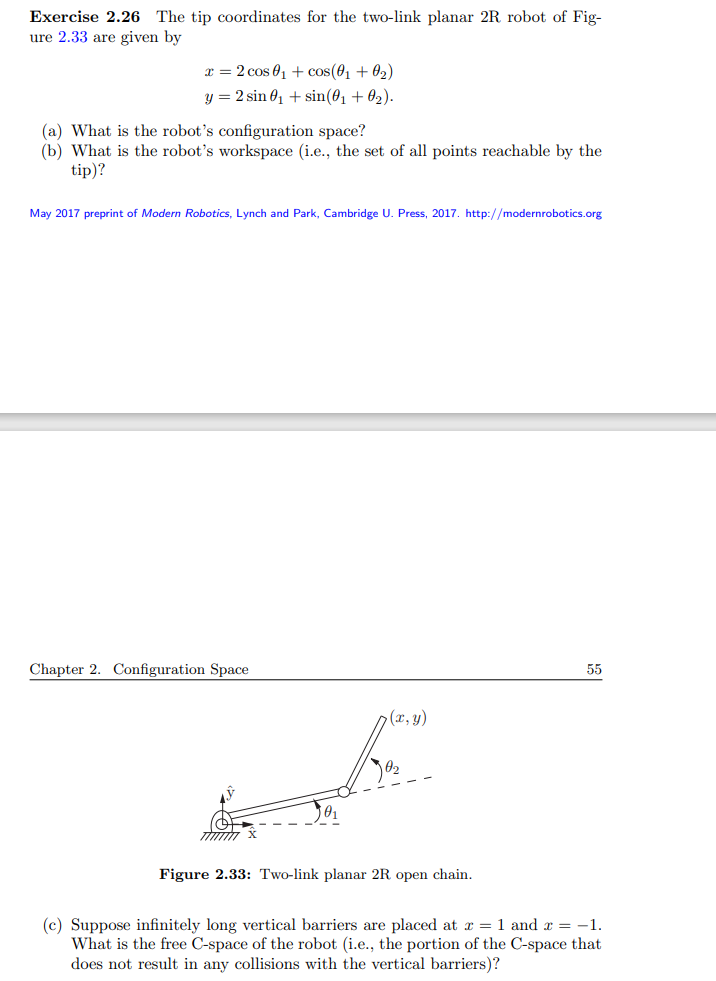
Exercise 2.26 The tip coordinates for the two-link planar 2R robot of Fig- ure 2.33 are given by x = 2 cos 01 + cos(01 +02) y = 2 sin 01 + sin(01 +02). (a) What is the robot's configuration space? (b) What is the robot's workspace (i.e., the set of all points reachable by the tip)? May 2017 preprint of Modern Robotics, Lynch and Park, Cambridge U. Press, 2017. http://modernrobotics.org Chapter 2. Configuration Space (x, y) 01 02 - 55 Figure 2.33: Two-link planar 2R open chain. (c) Suppose infinitely long vertical barriers are placed at x = 1 and x = 1. What is the free C-space of the robot (i.e., the portion of the C-space that does not result in any collisions with the vertical barriers)?
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts