

Question: Exercise 3. Observer for vehicle lateral dynamics (10pt) Consider the normalized linear model that describes the lateral dynamics of a vehicle i = o 1]
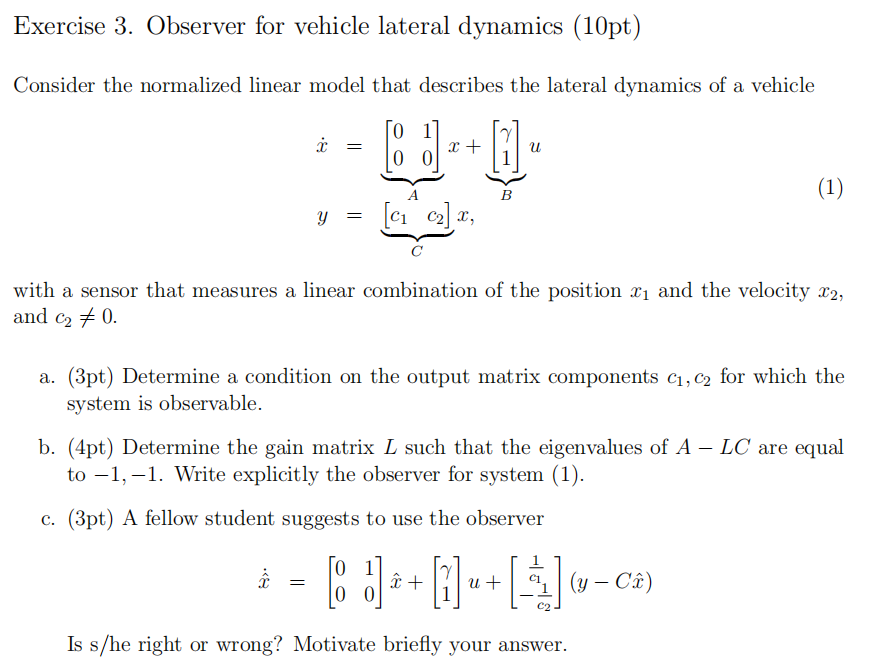
Exercise 3. Observer for vehicle lateral dynamics (10pt) Consider the normalized linear model that describes the lateral dynamics of a vehicle i = o 1] 2+ B (1) y = [ci ca] , with a sensor that measures a linear combination of the position x and the velocity 22, and C2 + 0. a. (3pt) Determine a condition on the output matrix components C1, C2 for which the system is observable. b. (4pt) Determine the gain matrix L such that the eigenvalues of A LC are equal to -1,-1. Write explicitly the observer for system (1). c. (3pt) A fellow student suggests to use the observer :- + [1]-[536-0 Is s/he right or wrong? Motivate briefly your answer. Exercise 3. Observer for vehicle lateral dynamics (10pt) Consider the normalized linear model that describes the lateral dynamics of a vehicle i = o 1] 2+ B (1) y = [ci ca] , with a sensor that measures a linear combination of the position x and the velocity 22, and C2 + 0. a. (3pt) Determine a condition on the output matrix components C1, C2 for which the system is observable. b. (4pt) Determine the gain matrix L such that the eigenvalues of A LC are equal to -1,-1. Write explicitly the observer for system (1). c. (3pt) A fellow student suggests to use the observer :- + [1]-[536-0 Is s/he right or wrong? Motivate briefly your
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts