

Question: Exercise 4 : Homogeneous Transformations Transformations between coordinate frames play an important role in robotics. The 2 D pose of a robot w . r
Exercise : Homogeneous Transformations
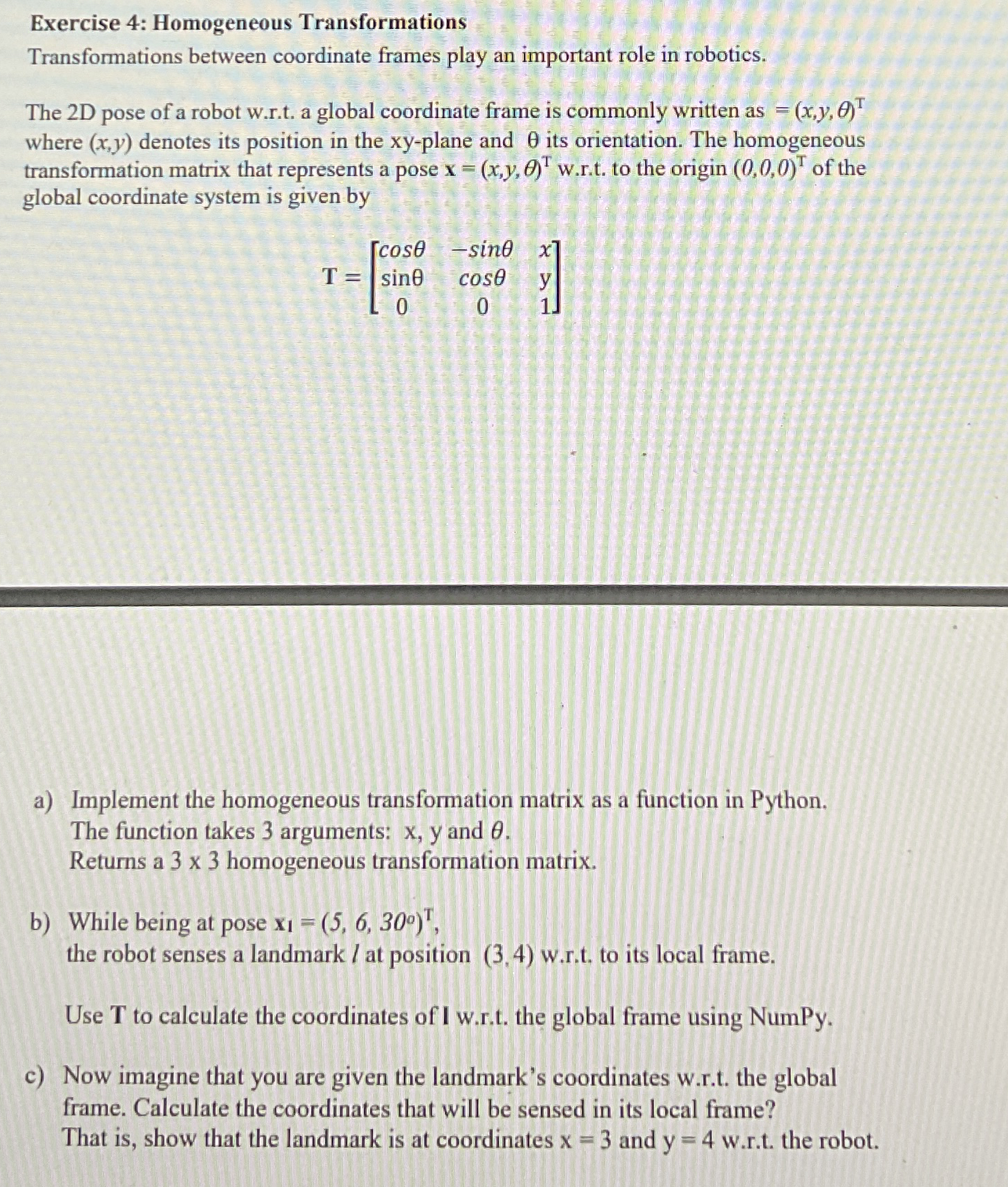
Transformations between coordinate frames play an important role in robotics.
The D pose of a robot wrt a global coordinate frame is commonly written as where denotes its position in the plane and its orientation. The homogeneous transformation matrix that represents a pose wrt to the origin of the global coordinate system is given by
a Implement the homogeneous transformation matrix as a function in Python. The function takes arguments: and
Returns a homogeneous transformation matrix.
b While being at pose the robot senses a landmark at position wrt to its local frame.
Use to calculate the coordinates of I wrt the global frame using NumPy.
c Now imagine that you are given the landmark's coordinates wrt the global frame. Calculate the coordinates that will be sensed in its local frame? That is show that the landmark is at coordinates and wrt the robot.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock