

Question: (b) (c) (d) Explain the term limiting error. In a multiple range instrument it is always advisable to take a reading where the indication
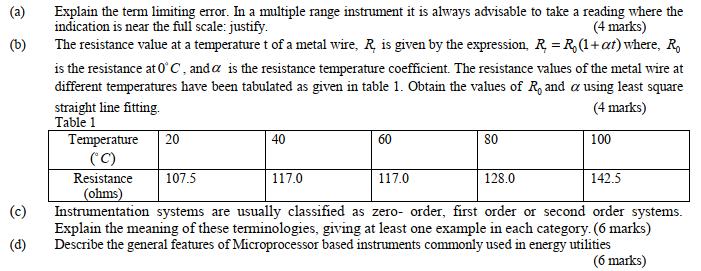
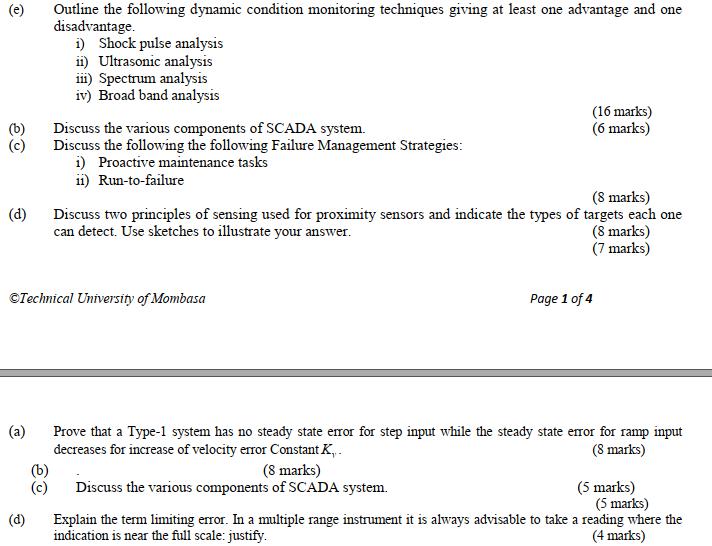
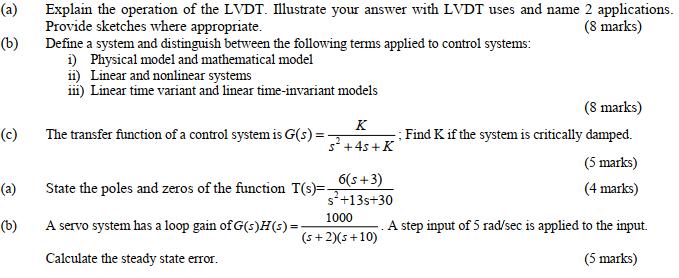
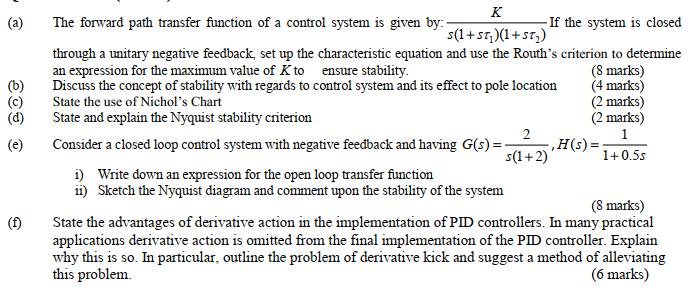
(b) (c) (d) Explain the term limiting error. In a multiple range instrument it is always advisable to take a reading where the indication is near the full scale: justify. (4 marks) The resistance value at a temperature t of a metal wire, R, is given by the expression, R = R. (1+at) where, R is the resistance at 0C, and a is the resistance temperature coefficient. The resistance values of the metal wire at different temperatures have been tabulated as given in table 1. Obtain the values of R, and a using least square (4 marks) 100 straight line fitting. Table 1 Temperature (C) 20 107.5 40 117.0 60 117.0 80 128.0 Resistance (ohms) Instrumentation systems are usually classified as zero- order, first order or second order systems. Explain the meaning of these terminologies, giving at least one example in each category. (6 marks) Describe the general features of Microprocessor based instruments commonly used in energy utilities (6 marks) 142.5 (e) (c) (d) (a) (d) Outline the following dynamic condition monitoring techniques giving at least one advantage and one disadvantage. 1) Shock pulse analysis ii) Ultrasonic analysis iii) Spectrum analysis iv) Broad band analysis Technical University of Mombasa (b) Discuss the various components of SCADA system. Discuss the following the following Failure Management Strategies: i) Proactive maintenance tasks ii) Run-to-failure (8 marks) Discuss two principles of sensing used for proximity sensors and indicate the types of targets each one can detect. Use sketches to illustrate your answer. (16 marks) (6 marks) (8 marks) Discuss the various components of SCADA system. (8 marks) (7 marks) Page 1 of 4 Prove that a Type-1 system has no steady state error for step input while the steady state error for ramp input decreases for increase of velocity error Constant K... (8 marks) (5 marks) (5 marks) Explain the term limiting error. In a multiple range instrument it is always advisable to take a reading where the indication is near the full scale: justify. (4 marks) (a) (b) (c) (a) (b) Explain the operation of the LVDT. Illustrate your answer with LVDT uses and name 2 applications. Provide sketches where appropriate. (8 marks) Define a system and distinguish between the following terms applied to control systems: 1) Physical model and mathematical model ii) Linear and nonlinear systems iii) Linear time variant and linear time-invariant models The transfer function of a control system is G(s) = K 5 +45+ K 6(s+3) s+13s+30 State the poles and zeros of the function T(s)=- A servo system has a loop gain of G(s)H(s) = Calculate the steady state error. 1000 (s+2)(s+10) (8 marks) ; Find K if the system is critically damped. (5 marks) (4 marks) A step input of 5 rad/sec is applied to the input. (5 marks) (a) (b) (c) (d) (e) K The forward path transfer function of a control system is given by:- -If the system is closed s(1+st)(1+ST) through a unitary negative feedback, set up the characteristic equation and use the Routh's criterion to determine an expression for the maximum value of K to Discuss the concept of stability with regards to control system and its effect to pole location State the use of Nichol's Chart ensure stability. State and explain the Nyquist stability criterion Consider a closed loop control system with negative feedback and having G(s) = 1) Write down an expression for the open loop transfer function ii) Sketch the Nyquist diagram and comment upon the stability of the system 2 s(1+2) (8 marks) (4 marks) (2 marks) (2 marks) 1 1+0.5s ,H(s) = (8 marks) State the advantages of derivative action in the implementation of PID controllers. In many practical applications derivative action is omitted from the final implementation of the PID controller. Explain why this is so. In particular, outline the problem of derivative kick and suggest a method of alleviating this problem. (6 marks)
Step by Step Solution
3.41 Rating (160 Votes )
There are 3 Steps involved in it
a Limiting Error Limiting error is the maximum error that can occur in a measurement It is usually specified as a percentage of the full scale reading For example a voltmeter with a limiting error of ... View full answer

Get step-by-step solutions from verified subject matter experts