

Question: explain your answer function - forwardOdom(distance, xStart, yStart) while (1) velocity 0.5; velmsg.Linear.Xvelocity; send(robot,velmsg); odomdata receive(odom,3); pose odomdata.Pose.Pose; x pose.Position.X; y - pose.Position.Y; if sart((x
explain your answer
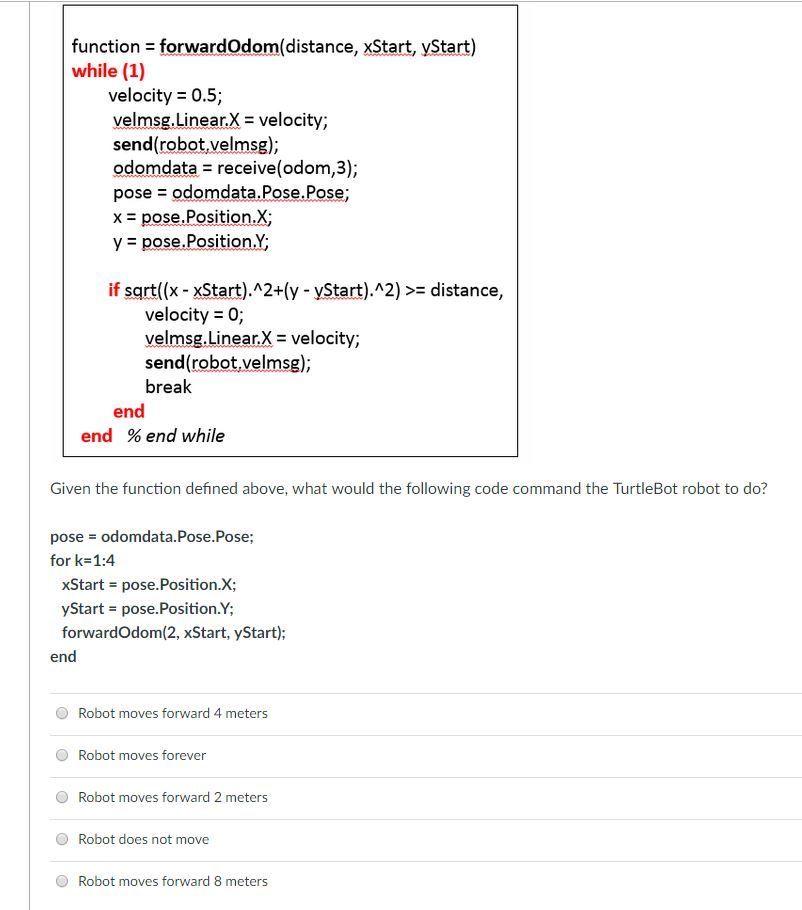

function - forwardOdom(distance, xStart, yStart) while (1) velocity 0.5; velmsg.Linear.Xvelocity; send(robot,velmsg); odomdata receive(odom,3); pose odomdata.Pose.Pose; x pose.Position.X; y - pose.Position.Y; if sart((x -xStart).A2+(y yStart).A2) >- distance, velocity-0 velmsgLineatX = velocity; send(robot,velmsg); break end end % end while Given the function deined above, what would the following code command the TurtleBot robot to do? pose-odomdata.Pose.Pose; for k-1:4 xStart- pose.Position.X; yStart pose.Position.Y; forwardOdom(2, xStart, yStart); end Robot moves forward 4 meters O Robot moves forever Robot moves forward 2 meters O Robot does not move Robot moves forward 8 meters function - forwardOdom(distance, xStart, yStart) while (1) velocity 0.5; velmsg.Linear.Xvelocity; send(robot,velmsg); odomdata receive(odom,3); pose odomdata.Pose.Pose; x pose.Position.X; y - pose.Position.Y; if sart((x -xStart).A2+(y yStart).A2) >- distance, velocity-0 velmsgLineatX = velocity; send(robot,velmsg); break end end % end while Given the function deined above, what would the following code command the TurtleBot robot to do? pose-odomdata.Pose.Pose; for k-1:4 xStart- pose.Position.X; yStart pose.Position.Y; forwardOdom(2, xStart, yStart); end Robot moves forward 4 meters O Robot moves forever Robot moves forward 2 meters O Robot does not move Robot moves forward 8 meters
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts