

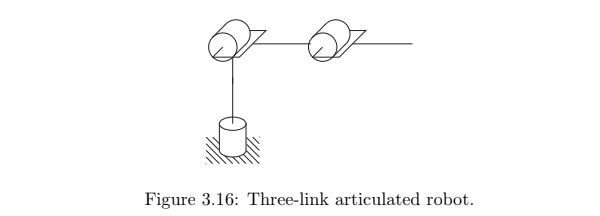
Question: Figure 3 . 1 6 : Three - link articulated robot. Consider the three - link articulated robot of Figure 3 . 1 6 .
Figure : Threelink articulated robot. Consider the threelink articulated robot of Figure Derive the
forward kinematic equations using the DH convention. please make a table for the link length a link twist alpha link offsetd and joint angletheta for each link and create coordinate frames for each link
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock