

Figurel shows a photo of the Stanford Manipulator. The manipulator has five revolute joints and one...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
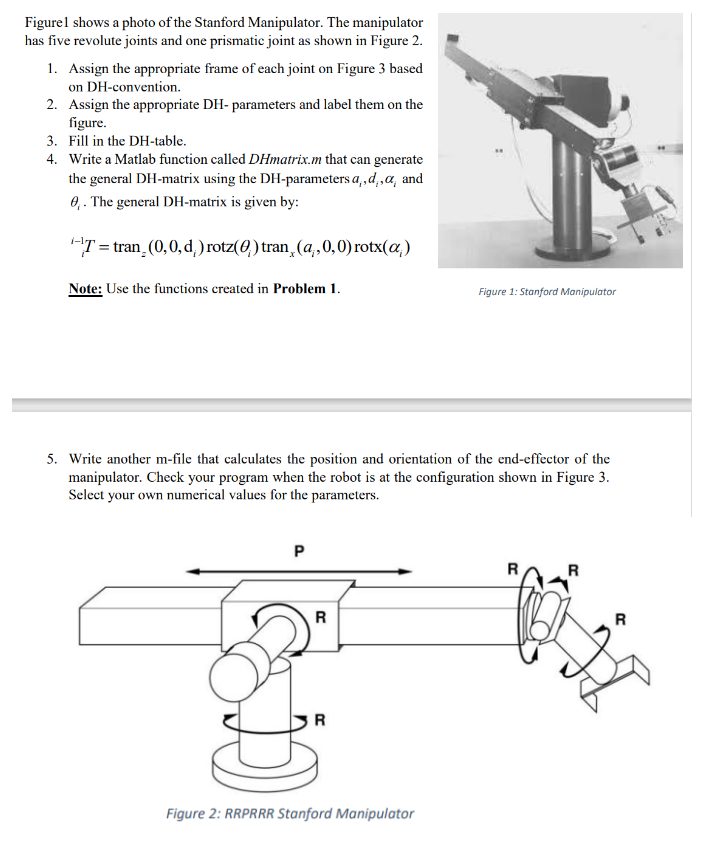
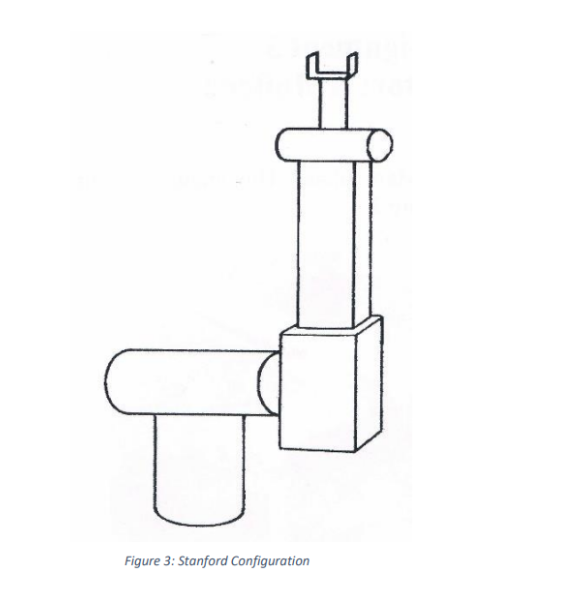
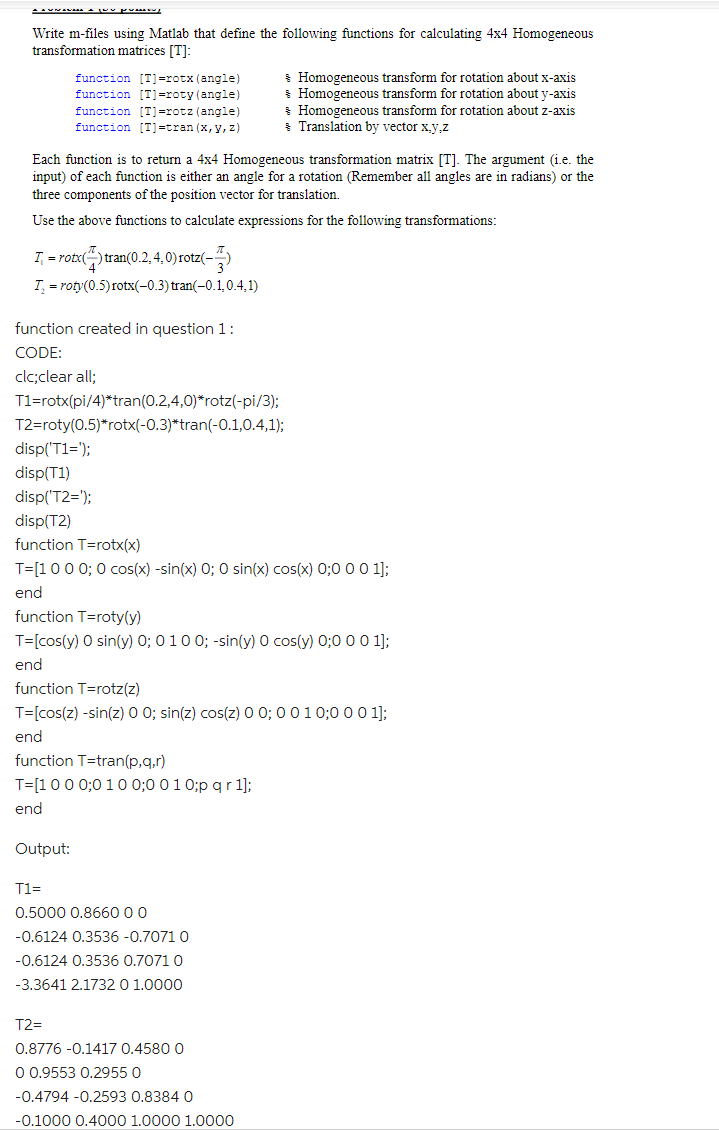
Figurel shows a photo of the Stanford Manipulator. The manipulator has five revolute joints and one prismatic joint as shown in Figure 2. 1. Assign the appropriate frame of each joint on Figure 3 based on DH-convention. 2. Assign the appropriate DH- parameters and label them on the figure. 3. Fill in the DH-table. 4. Write a Matlab function called DHmatrix.m that can generate the general DH-matrix using the DH-parameters a,,d,,a, and 0. The general DH-matrix is given by: HT=tran, (0, 0, d) rotz(0) tran (a,0,0) rotx(a) Note: Use the functions created in Problem 1. 5. Write another m-file that calculates the position and orientation of the end-effector of the manipulator. Check your program when the robot is at the configuration shown in Figure 3. Select your own numerical values for the parameters. P R 820 R Figure 1: Stanford Manipulator Figure 2: RRPRRR Stanford Manipulator R R R Figure 3: Stanford Configuration **UNIUM * 100 pm Write m-files using Matlab that define the following functions for calculating 4x4 Homogeneous transformation matrices [T]: function [I]=rotx (angle) function [T]=roty (angle) function [T]=rotz (angle) function [T]-tran (x, y, z) Each function is to return a 4x4 Homogeneous transformation matrix [T]. The argument (i.e. the input) of each function is either an angle for a rotation (Remember all angles are in radians) or the three components of the position vector for translation. Use the above functions to calculate expressions for the following transformations: T = rotx() tran(0.2, 4,0) rotz(-) T = roty(0.5) rotx(-0.3) tran(-0.1,0.4.1) function created in question 1: CODE: clc;clear all; T1=rotx(pi/4)*tran(0.2,4,0)*rotz(-pi/3); T2=roty(0.5)*rotx(-0.3)*tran(-0.1,0.4,1); disp('T1='); disp(T1) disp('T2='); disp(T2) function T=rotx(x) T=[1 0 0 0; 0 cos(x) -sin(x) 0; O sin(x) cos(x) 0;0 0 0 1]; end Output: Homogeneous transform for rotation about x-axis Homogeneous transform for rotation about y-axis Homogeneous transform for rotation about z-axis Translation by vector x,y,z function T=roty(y) T=[cos(y) 0 sin(y) 0; 0 1 0 0; -sin(y) 0 cos(y) 0:0 0 0 1]; end function T=rotz(z) T=[cos(z) -sin(z) 0 0; sin(z) cos(z) 0 0; 0 0 1 0;0 0 0 1]; end function T-tran(p,q,r) T= [1 0 0 0;0 1 0 0;0 0 1 0;p q r 1]; end T1= 0.5000 0.8660 0 0 -0.6124 0.3536 -0.7071 0 -0.6124 0.3536 0.7071 0 -3.3641 2.1732 0 1.0000 T2= 0.8776 -0.1417 0.4580 0 O 0.9553 0.2955 0 -0.4794 -0.2593 0.8384 0 -0.1000 0.4000 1.0000 1.0000 Figurel shows a photo of the Stanford Manipulator. The manipulator has five revolute joints and one prismatic joint as shown in Figure 2. 1. Assign the appropriate frame of each joint on Figure 3 based on DH-convention. 2. Assign the appropriate DH- parameters and label them on the figure. 3. Fill in the DH-table. 4. Write a Matlab function called DHmatrix.m that can generate the general DH-matrix using the DH-parameters a,,d,,a, and 0. The general DH-matrix is given by: HT=tran, (0, 0, d) rotz(0) tran (a,0,0) rotx(a) Note: Use the functions created in Problem 1. 5. Write another m-file that calculates the position and orientation of the end-effector of the manipulator. Check your program when the robot is at the configuration shown in Figure 3. Select your own numerical values for the parameters. P R 820 R Figure 1: Stanford Manipulator Figure 2: RRPRRR Stanford Manipulator R R R Figure 3: Stanford Configuration **UNIUM * 100 pm Write m-files using Matlab that define the following functions for calculating 4x4 Homogeneous transformation matrices [T]: function [I]=rotx (angle) function [T]=roty (angle) function [T]=rotz (angle) function [T]-tran (x, y, z) Each function is to return a 4x4 Homogeneous transformation matrix [T]. The argument (i.e. the input) of each function is either an angle for a rotation (Remember all angles are in radians) or the three components of the position vector for translation. Use the above functions to calculate expressions for the following transformations: T = rotx() tran(0.2, 4,0) rotz(-) T = roty(0.5) rotx(-0.3) tran(-0.1,0.4.1) function created in question 1: CODE: clc;clear all; T1=rotx(pi/4)*tran(0.2,4,0)*rotz(-pi/3); T2=roty(0.5)*rotx(-0.3)*tran(-0.1,0.4,1); disp('T1='); disp(T1) disp('T2='); disp(T2) function T=rotx(x) T=[1 0 0 0; 0 cos(x) -sin(x) 0; O sin(x) cos(x) 0;0 0 0 1]; end Output: Homogeneous transform for rotation about x-axis Homogeneous transform for rotation about y-axis Homogeneous transform for rotation about z-axis Translation by vector x,y,z function T=roty(y) T=[cos(y) 0 sin(y) 0; 0 1 0 0; -sin(y) 0 cos(y) 0:0 0 0 1]; end function T=rotz(z) T=[cos(z) -sin(z) 0 0; sin(z) cos(z) 0 0; 0 0 1 0;0 0 0 1]; end function T-tran(p,q,r) T= [1 0 0 0;0 1 0 0;0 0 1 0;p q r 1]; end T1= 0.5000 0.8660 0 0 -0.6124 0.3536 -0.7071 0 -0.6124 0.3536 0.7071 0 -3.3641 2.1732 0 1.0000 T2= 0.8776 -0.1417 0.4580 0 O 0.9553 0.2955 0 -0.4794 -0.2593 0.8384 0 -0.1000 0.4000 1.0000 1.0000
Expert Answer:

Related Book For 
Posted Date:
Students also viewed these mechanical engineering questions
-
Read and answer the question below. EMBRACE DEMOGRAPHICS AND SOCIETAL CHANGES Using Differences to Drive Value Force 7: Demographics and Societal Changes. One of the most important forces that is...
-
s1 educated (SSE) student for every three public school educated (PSE) students. Reasoning that students are not very dissimilar from threads, he suggests the following entry and exit routines be...
-
The figure below represents a schematic of pipe network. A rate of 35 Ls, is pumped to feed two lines (3-4-5-6; and 2-7-8). The length and diameter of each pipe segment are listed in the table....
-
When making homemade ice cream in a hand-cranked freezer, the tub containing the ice cream mix is surrounded by a brine (water/salt) solution. To freeze the ice cream mix rapidly so that smooth and...
-
Below is a project WBS with cost apportioned by percents. If the total project cost is estimated to be $600,000, what are the estimated costs for the following deliverables? a. Design? b....
-
Journals, subsidiary ledgers and control accounts Cavuilati and Companys Accounts Receivable control account in the general ledger on 1 March was \($12\) 090. The subsidiary ledger contained the...
-
Marathon Running Shop has two service departments (advertising and administration) and two operating departments (shoes and clothing). During 2013, the departments had the following direct expenses...
-
1. 20 The full symbols of atoms of elements R, T, X, Y and Z are 2R, 31, 30, 34X, and 5Z respectively 15 15 164, Which one of the following is an isotope of Y A. R B. T C. X D. Z 2. The electronic...
-
A movie stunt performer is filming a scene where he swings across a river on a vine. The safety crew must use a vine with enough strength so that it doesn't break while swinging. The stunt...
-
If a systems memory is 32GB (1 GB = 230 B) and each memory location stores 1B. How many address bits are needed if we need to address each byte?
-
Total assets S The shareholders' equity of Sandhill Corporation is $117,600. Its total liabilities are $53,900. What is the amount of Sandhill's total assets?
-
The following funds were among those held by State College at December 31, 20X1: Principal specified by the donor as nonexpendable . . . . . . . . . . . . . $500,000 Principal expendable after the...
-
Which one offers the best financial aid for a student? Consider using the award analyzer to compare the offers. How did you feel reviewing these award letters? Were they confusing to you? Why or why...
-
Betty's BBQ reported sales of $705,000 and net income of $25,000. Betty's also reported ending total assets of $494,000 and beginning total assets of $387,000. Required: Calculate the return on...
-
Four genes (A, B, C, D) are in the same chromosome, but their order is not yet known. The distance between A and B is 4 map units, between A and C is 6 map units, between A and D is 1 map unit,...
-
Explain why it is not wise to accept a null hypothesis.
-
For the same line loads given in Problem 10.8, determine the vertical stress increase, ÎÏz, at a point located 3 m below the line load, q2. 42 1 292 kN/m 45 4.5 m
-
The properties of seven different clayey soils are shown below (Skempton and Northey, 1952). Investigate the relationship between the strength and plasticity characteristics by performing the...
-
Repeat Problem 2.11 with the following values: Gs = 2.75, temperature of water = 23C, t = 100 min, and L = 12.8 cm. Repeat Problem 2.11 A hydrometer test has the following result: Gs = 2.7,...
-
A Pepsi promotion encouraged consumers to collect Pepsi points and redeem them for merchandise. If they did not have quite enough points for the prize they wanted, they could buy additional points...
-
Daphne Brown-Wright worked as a teacher for East St. Louis School District 189 from 1975 until 1998 and then returned as an administrator from 2002 until 2012, thus serving the District for 33...
-
In 1988, the Upper Deck Company was a company with an idea for a better baseball card: one that had a hologram on it. By the 1990s, the firm was a major corporation worth at least a quarter of a...

Study smarter with the SolutionInn App