

Question: For each mechanism shown, define vector loops suitable for a complete kinematic analysis. Obtain scalar component position equations and list out the constants and

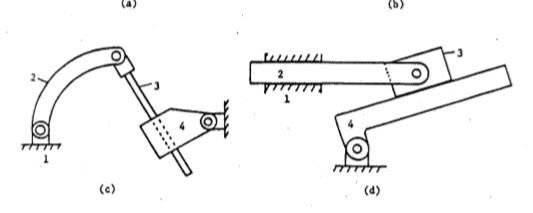
For each mechanism shown, define vector loops suitable for a complete kinematic analysis. Obtain scalar component position equations and list out the constants and unknown variables. Assume in each case the motion of link 2 to be the known input.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock