

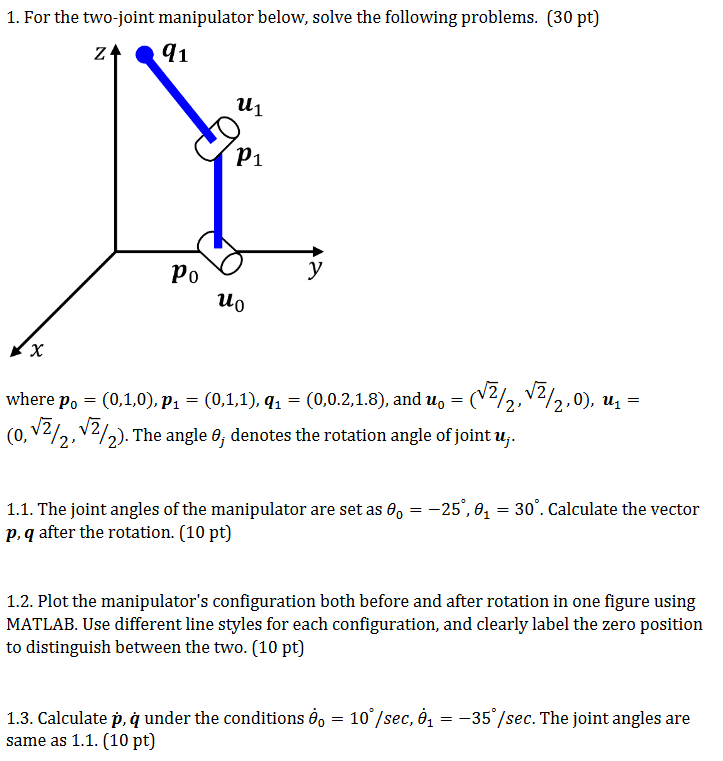
Question: For the two - joint manipulator below, solve the following problems. ( 3 0 pt ) x where p 0 = ( 0 , 1
For the twojoint manipulator below, solve the following problems. pt
where and
The angle denotes the rotation angle of joint
The joint angles of the manipulator are set as Calculate the vector
after the rotation.
Plot the manipulator's configuration both before and after rotation in one figure using
MATLAB. Use different line styles for each configuration, and clearly label the zero position
to distinguish between the two. pt
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock