

Question: For the two - link ( R R ) robot arm analyzed earlier, suppose now that the end effector B is desired to trace a
For the twolink robot arm analyzed
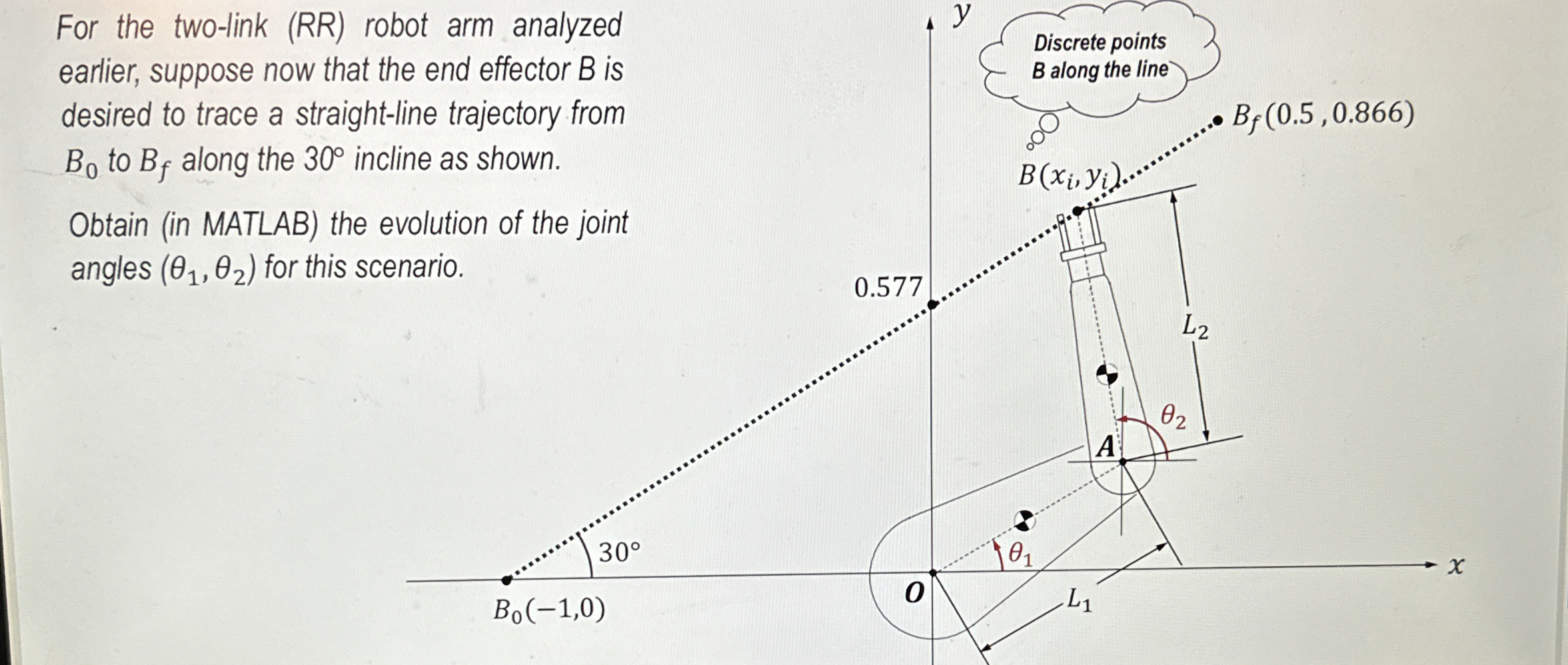
earlier, suppose now that the end effector B is
desired to trace a straightline trajectory from
to along the incline as shown.
Obtain in MATLAB the evolution of the joint
angles for this scenario.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock