

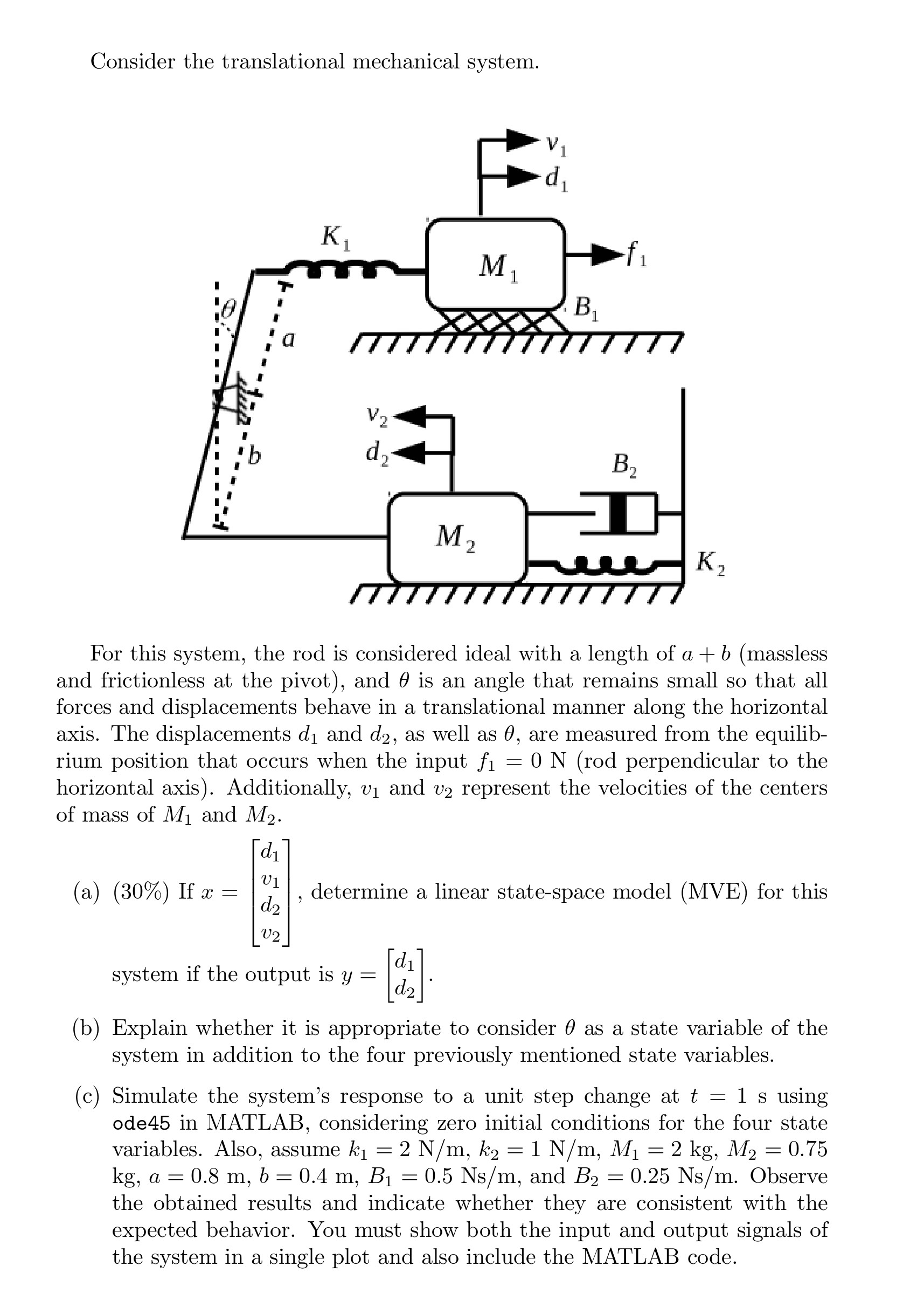
Question: For this system, the rod is considered ideal with a length of a + b ( massless and frictionless at the pivot ) , and
For this system, the rod is considered ideal with a length of massless
and frictionless at the pivot and is an angle that remains small so that all
forces and displacements behave in a translational manner along the horizontal
axis. The displacements and as well as are measured from the equilib
rium position that occurs when the input rod perpendicular to the
horizontal axis Additionally, and represent the velocities of the centers
of mass of and
a If determine a linear statespace model MVE for this
system if the output is
b Explain whether it is appropriate to consider as a state variable of the
system in addition to the four previously mentioned state variables.
c Simulate the system's response to a unit step change at using
ode in MATLAB, considering zero initial conditions for the four state
variables. Also, assume
and Observe
the obtained results and indicate whether they are consistent with the
expected behavior. You must show both the input and output signals of
the system in a single plot and also include the MATLAB code.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock