

Question: Hello chegg , I need you help with my project , we are working on a project for robotics with VEX robotic kit . This

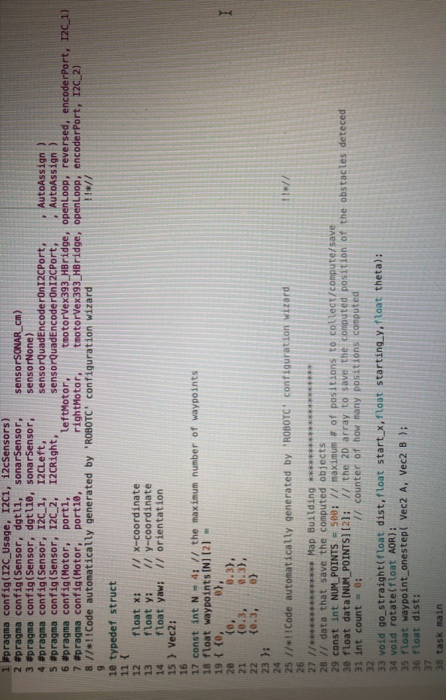
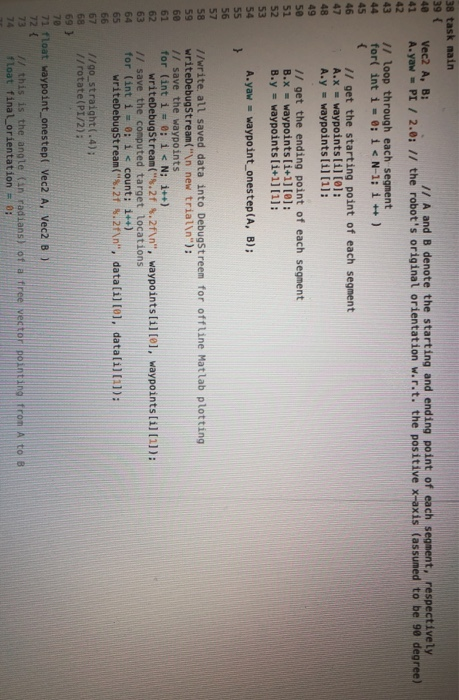
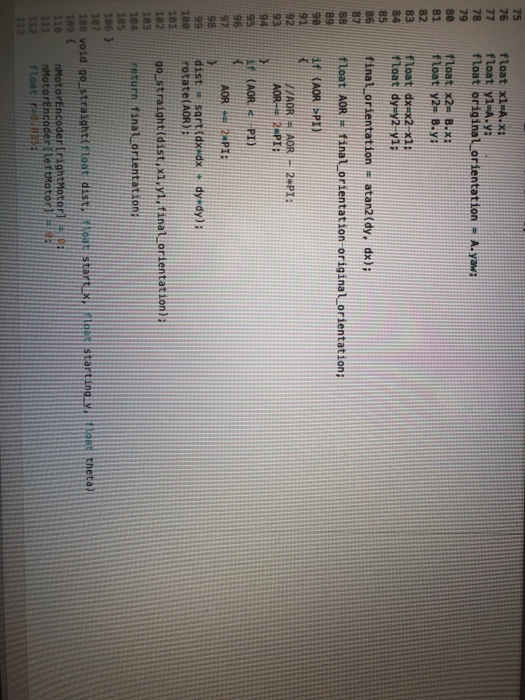
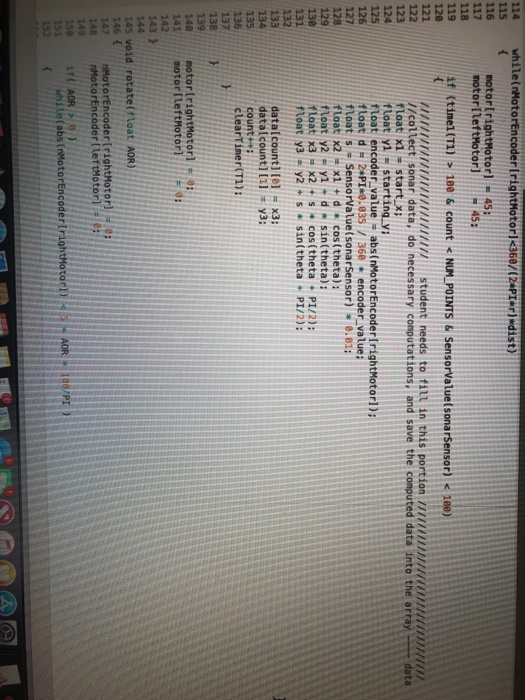
Project Description: Build a mobile robot that can move on a 2D plane. Program your robot to go/travel through a given list of waypoints with specified 2D coordinates. The robot should be able to do this autonomously/automatically once the waypoints are given. At the same time, the robot should detect objects/obstacles that are seen" by its onboard range sensor (e.g., sonar). Obtain a plot of robot's own trajectory along with obstacles it detected on the way Hardware: VEX Robotic Kit Software: RobotC for VEX Project Description: Build a mobile robot that can move on a 2D plane. Program your robot to go/travel through a given list of waypoints with specified 2D coordinates. The robot should be able to do this autonomously/automatically once the waypoints are given. At the same time, the robot should detect objects/obstacles that are seen" by its onboard range sensor (e.g., sonar). Obtain a plot of robot's own trajectory along with obstacles it detected on the way Hardware: VEX Robotic Kit Software: RobotC for VEX
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts