

Question: How would you implement the following in C or C++ with 6 and 12 data points? Source code would be very helpful. Table 2. Sign
How would you implement the following in C or C++ with 6 and 12 data points?
Source code would be very helpful.
Table 2. Sign definition of sensor raw measurements
| Accelerometer (signed integer) | |||
| Stationary position | Ax | Ay | Az |
| Zb down | 0 | 0 | +1 g |
| Zb up | 0 | 0 | -1 g |
| Yb down | 0 | +1 g | 0 |
| Yb up | 0 | -1 g | 0 |
| Xb down | +1 g | 0 | 0 |
| Xb up | -1 g | 0 | 0 |
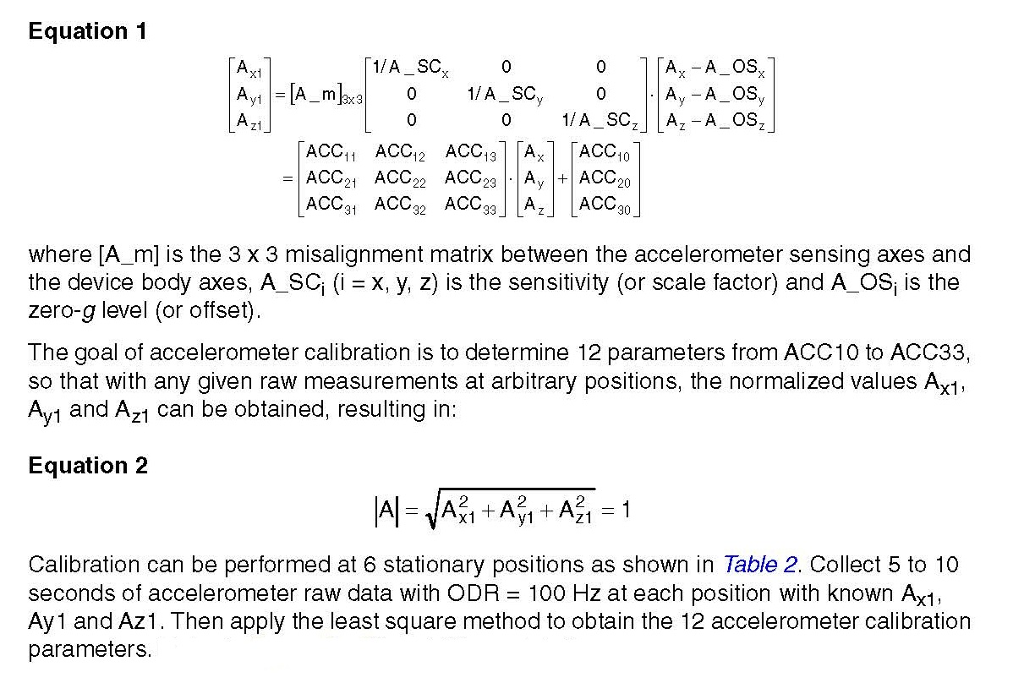

Equation 1 1/ A SC A OS 1/ A SC A,, A OS m 1/ A SC A OS Z1 ACC ACC ACC AxT ACC ACC ACC 22 ACC 23 A 20 ACC ACC 32 ACC 33 Az ACC 30 where [A m] is the 3 x 3 misalignment matrix between the accelerometer sensing axes and the device body axes, A SCi (i 3x, y, z) is the sensitivity (or scale factor) and A OSi is the zero-g level (or offset). The goal of accelerometer calibration is to determine 12 parameters from ACC10 to ACC33, so that with any given raw measurements at arbitrary positions, the normalized values A Ay1 and Az1 can be obtained, resulting in: Equation 2 x1 Z1 Calibration can be performed at 6 stationary positions as shown in Table 2. Collect 5 to 10 seconds of accelerometer raw data with ODR 100 Hz at each position with known Ax1, Ay 1 and AZ1. Then apply the least square method to obtain the 12 accelerometer calibration parameters
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts