

Question: I def numerical_simulation (f,t,x,t0-0.,dt-le-4,ut-None, ux-None,utx-None, return u-False) simulate x' - f(x,u) input: fR x X x U --> X- vector field X - state space
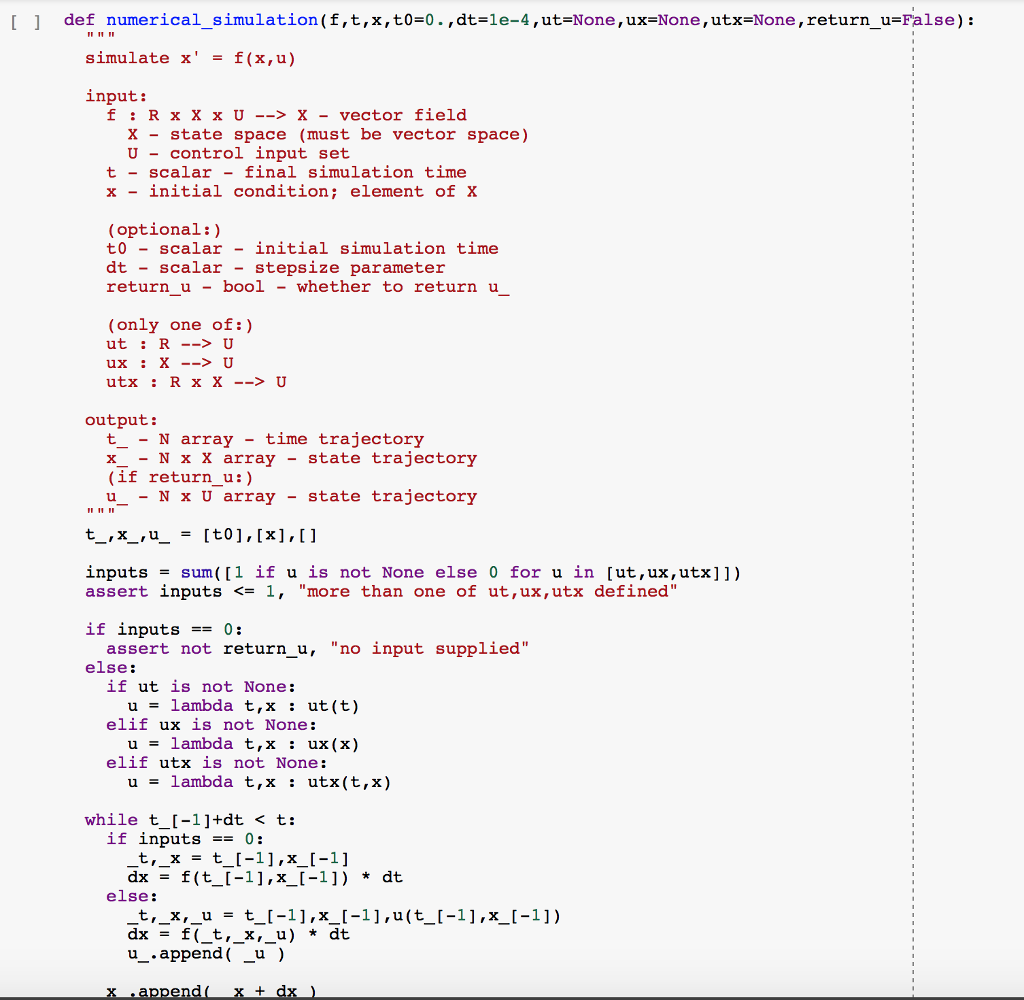
I def numerical_simulation (f,t,x,t0-0.,dt-le-4,ut-None, ux-None,utx-None, return u-False) simulate x' - f(x,u) input: fR x X x U --> X- vector field X - state space (must be vector space) U-control input set tscalar- final simulation time x - initial condition; element of X (optional:) t0scalar - initial simulation time dt- scalar - stepsize parameter return u - bool -whether to returnu (only one of:) ut:R --> U ux: X --> U output: t - N array - time trajectory x- Nx X array - state trajectory (if return _u:) u- N x U array - state trajectory inputs -sum([1 if u is not None else 0 for u in [ut,ux,utx]]) assert inputs X- vector field X - state space (must be vector space) U-control input set tscalar- final simulation time x - initial condition; element of X (optional:) t0scalar - initial simulation time dt- scalar - stepsize parameter return u - bool -whether to returnu (only one of:) ut:R --> U ux: X --> U output: t - N array - time trajectory x- Nx X array - state trajectory (if return _u:) u- N x U array - state trajectory inputs -sum([1 if u is not None else 0 for u in [ut,ux,utx]]) assert inputs
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts