

Question: I. Discrete-Time Systems: Let A = RNN, BERNIM & (A, B) controllable x(k+1)=Ax(k)+ Bu(k); x(0) R. a) Set u(k) = 0. Use || 4||=1
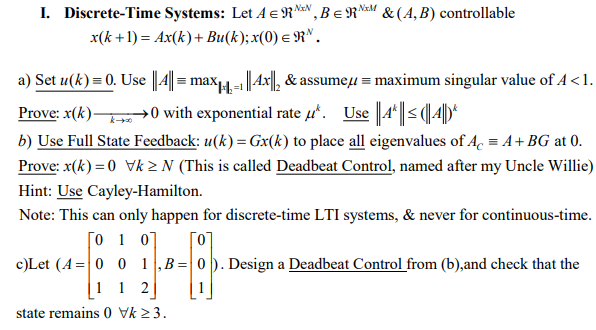
I. Discrete-Time Systems: Let A = RNN, BERNIM & (A, B) controllable x(k+1)=Ax(k)+ Bu(k); x(0) R. a) Set u(k) = 0. Use || 4||=1 max X=1 ||4x|| & assume = maximum singular value of A 0 with exponential rate *. Use ||A*|(A)* b) Use Full State Feedback: u(k) = Gx(k) to place all eigenvalues of 4c = A+ BG at 0. Prove: x(k) = 0 VkN (This is called Deadbeat Control, named after my Uncle Willie) Hint: Use Cayley-Hamilton. Note: This can only happen for discrete-time LTI systems, & never for continuous-time. [010] c)Let (4001, B = 0). Design a Deadbeat Control from (b),and check that the 11 2 state remains 0 Vk3.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts