

Question: I have attached here, arduino code for two separate proximity sensors. Is there a way you can modify the code so that the two proximity
I have attached here, arduino code for two separate proximity sensors. Is there a way you can modify the code so that the two proximity sensors work at the same, rather than just one? Also, can you find a way to get the proximity sensor measurements to be more accurate (returning decimal points and not just whole numbers)?
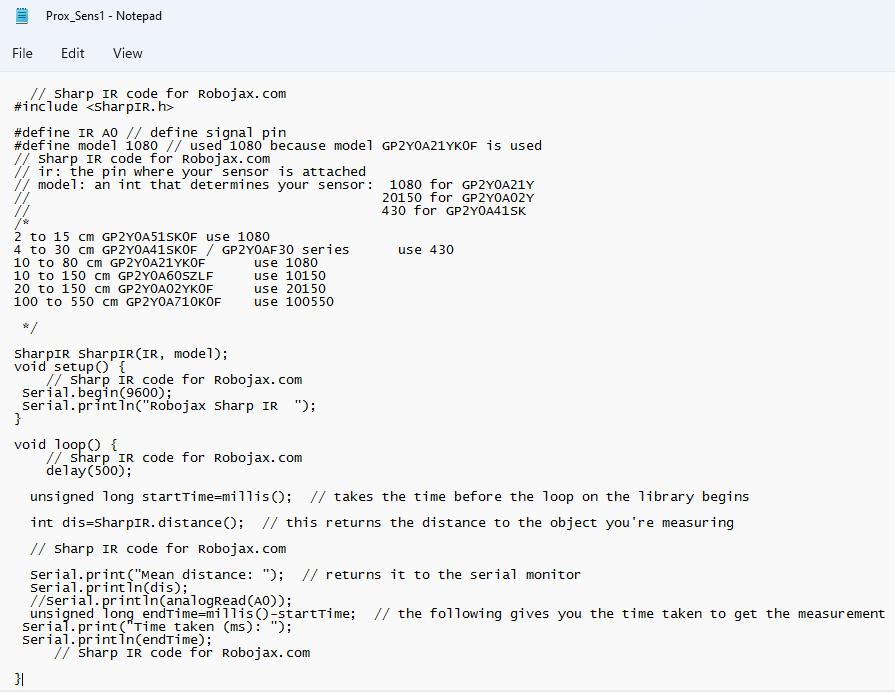
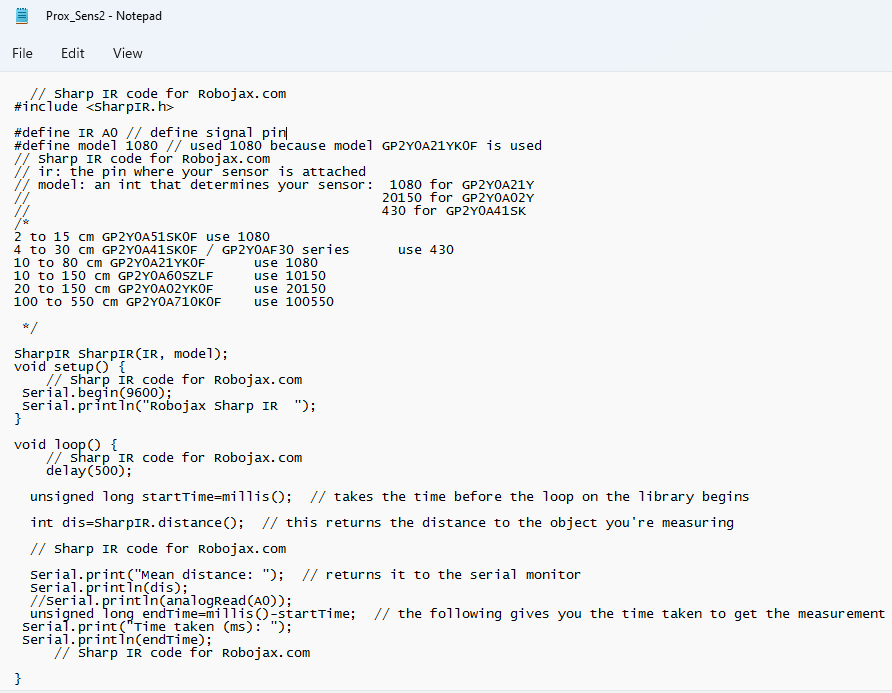
// sharp IR code for Robojax. com \#include \#define IR A0 // define signal pin \#define model 1080// used 1080 because model GP2Y0A21YKOF is used // Sharp IR code for Robojax. com // ir: the pin where your sensor is attached // mode1: an int that determines your sensor: 1080 for GP2Y0A21Y // mode7: an int that determines your sensor: 20150 for GP2YOA21Y 1/1 430 for GP2Y0A415K 2 to 15cm GP2Y0A515K0F use 1080 4 to 30cm GP2YOA41SKOF / GP2YOAF30 series use 430 10 to 80cm GP2YOA21YKOF C use 1080 10to150cmGP2Y0A60SZLF20to150cmGP2YOA02YKOFuse10150use20150 100 to 550cm GP2YOA710KOF use 100550 */ SharpIR SharpIR(IR, model); void setup() Seriat. Sharp IR code for Robojax. com Seria1.begin (9600) seria1.println("Robojax sharp IR "); void Toop() \{ // sharp IR code for Robojax. com delay (500); unsigned long startTime=millis(); // takes the time before the loop on the library begins int dis=sharpIR.distance(); // this returns the distance to the object you're measuring // sharp IR code for Robojax.com Serial.print("Mean distance: "); // returns it to the serial monitor Serial.println(dis); //seria1.print In(analogread(AO)); unsigned long endTime=millis()-startTime; // the following gives you the time taken to get the measure serial.print("Time taken (ms): "); seria1.print 7n(endTime); // sharp IR code for Robojax. com 31 // sharp IR code for Robojax.com \#include \#define IR A0 // define signal pin \#define mode7 1080// used 1080 because mode1 GP2Y0A21YKOF is used // Sharp IR code for Robojax. com // ir: the pin where your sensor is attached // model: an int that determines your sensor: 1080 for GP2Y0A21Y 20150 for GP2Y0A02Y 430 for GP2YOA415K 1/1 2 to 15cm GP2Y0A515K0F use 1080 4 to 30cm GP2YOA41SKOF / GP2YOAF30 series use 430 10 to 80cm GP2Y0A21YK0F use 1080 20to150cmGP2YOA02YKOF100to550cmGP2YOA710KOFuse20150use100550 */ SharpIR SharpIR(IR, mode 1); void setup() Seriat sharp IR code for Robojax. com Seria1.begin (9600) serial.println("Robojax sharp IR "); void 7 Toop() // sharp IR code for Robojax. com delay (500); unsigned long startTime=millis(); // takes the time before the loop on the 7ibrary begins int dis=sharpir. distance(); // this returns the distance to the object you're measuring // sharp IR code for Robojax.com Serial.print("Mean distance: "); // returns it to the serial monitor Serial.println(dis); //serial.print ln(analogread(A0)); unsigned long endTime=millis()-startTime; // the following gives you the time taken to get the measure Serial.print("Time taken (ms): "); seria1.print 7n(endTime); // sharp IR code for Robojax. com \}
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts