

Question: I need SWOT table about this product. It does not to be perfect, I just need a draft. First picture is about the assignment condition,
I need SWOT table about this product.
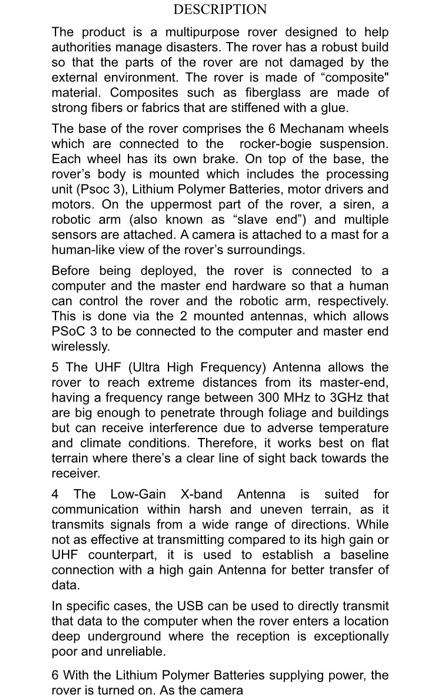
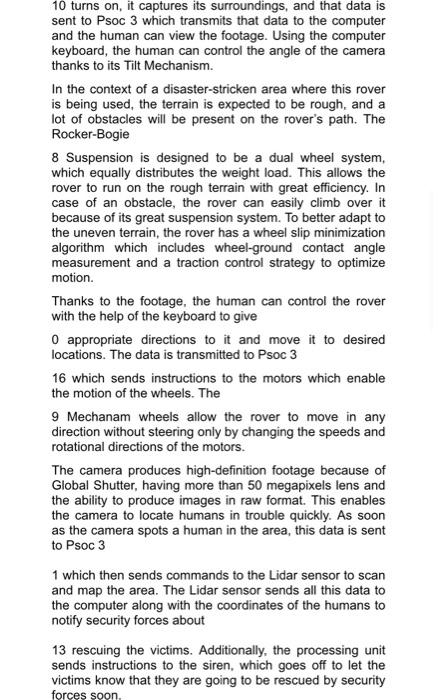
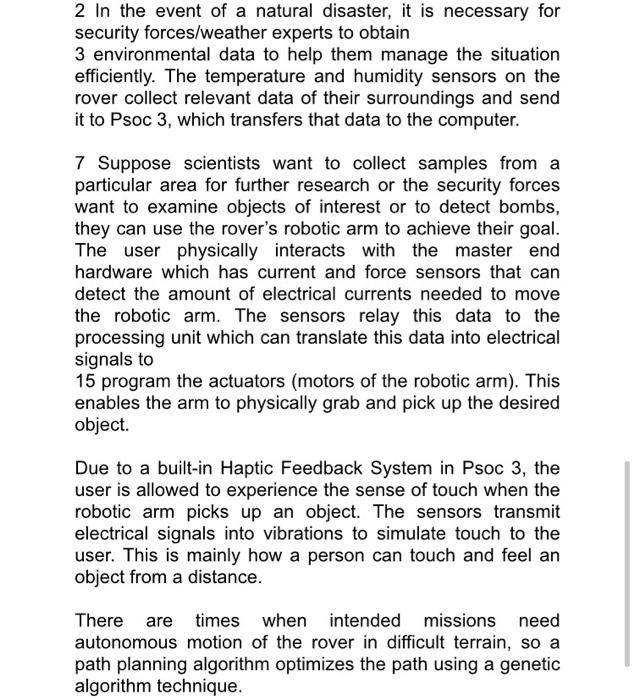
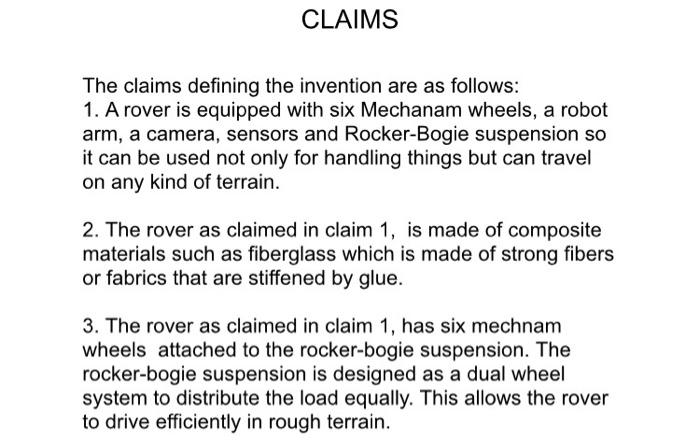
5. Marketing Strategy and Sales Plan Your objective here is to describe the activities that will allow you to meet the sales and margin levels indicated in your prospective financial statements. Both general and specific information must be included in this part of your plan. Do not underestimate the importance of presenting a well-conceived sales strategy. Without an efficient approach to beating a path to the doors of potential customers, companies with very good products and services often fail. The emphasis in this section should be on your company's unique ability to satisfy the needs of the marketplace. Avoid criticising your competition's products too severely, because the natural tendency of a reader who is not part of your organisation will be to empathise with the unrepresented party - your competition. Concentrate on the positive aspects of your product's ability to meet existing market needs and allow your readers to come to their own conclusions about your competition based on the objective information presented here. 1. What is our product? The product is a multipurpose rover designed to help authorities manage disasters. The rover is made of "composite" material such as fiberglass which makes it robust. The rover is equipped with six Mechanam wheels and Rocker-Bogie suspension which makes the rover adapt any terrain. A robotic arm which is haptically enabled allows you to control the arm remotely and feel/examine objects. The camera and sensors enable efficient navigation and autonomous path planning. 2. Who are your customers? - Military (e.g., bomb response units, surveillance units, intelligence units) - Disaster management authorities 3. Why you are the best option in the market? The rover has an incredible communication range which allows the person controlling it to obtain data from a large distance as compared to other rovers which have low communication ranges. Our suspension system is on par with space rovers which makes it extremely adaptive to most terrains whereas other rovers are more specialized for certain terrains. The camera on the rover is high definition in contrast to the low-definition cameras on other rovers. The mechanam wheels are self sufficient when it comes to navigation, so the rover doesn't need a separate navigation system. However, other rovers have a separate navigation system which complicates the overall rover system. The robotic arm on our rover is one of its kind since its haptically enabled which allows you to feel (in a literal sense) whatever object the robotic arm has captured. In comparison, some rovers are not even equipped with an arm and even if they are, the arms are not haptically enabled, so they do not allow the user to feel the object. This expands the usefulness of our rover and makes it a great asset for the bomb response units in the military. In conclusion, the great variety in the rover components makes it general purpose and doesn't limit it to specific purposes. DESCRIPTION The product is a multipurpose rover designed to help authorities manage disasters. The rover has a robust build so that the parts of the rover are not damaged by the external environment. The rover is made of "composite" material. Composites such as fiberglass are made of strong fibers or fabrics that are stiffened with a glue. The base of the rover comprises the 6 Mechanam wheels which are connected to the rocker-bogie suspension. Each wheel has its own brake. On top of the base, the rover's body is mounted which includes the processing unit (Psoc 3), Lithium Polymer Batteries, motor drivers and motors. On the uppermost part of the rover, a siren, a robotic arm (also known as "slave end") and multiple sensors are attached. A camera is attached to a mast for a human-like view of the rover's surroundings. Before being deployed, the rover is connected to a computer and the master end hardware so that a human can control the rover and the robotic arm, respectively. This is done via the 2 mounted antennas, which allows PSoC 3 to be connected to the computer and master end wirelessly. 5 The UHF (Ultra High Frequency) Antenna allows the rover to reach extreme distances from its master-end, having a frequency range between 300MHz to 3GHz that are big enough to penetrate through foliage and buildings but can receive interference due to adverse temperature and climate conditions. Therefore, it works best on flat terrain where there's a clear line of sight back towards the receiver. 4 The Low-Gain X-band Antenna is suited for communication within harsh and uneven terrain, as it transmits signals from a wide range of directions. While not as effective at transmitting compared to its high gain or UHF counterpart, it is used to establish a baseline connection with a high gain Antenna for better transfer of data. In specific cases, the USB can be used to directly transmit that data to the computer when the rover enters a location deep underground where the reception is exceptionally poor and unreliable. 6 With the Lithium Polymer Batteries supplying power, the rover is turned on. As the camera 10 turns on, it captures its surroundings, and that data is sent to Psoc 3 which transmits that data to the computer and the human can view the footage. Using the computer keyboard, the human can control the angle of the camera thanks to its Tilt Mechanism. In the context of a disaster-stricken area where this rover is being used, the terrain is expected to be rough, and a lot of obstacles will be present on the rover's path. The Rocker-Bogie 8 Suspension is designed to be a dual wheel system, which equally distributes the weight load. This allows the rover to run on the rough terrain with great efficiency. In case of an obstacle, the rover can easily climb over it because of its great suspension system. To better adapt to the uneven terrain, the rover has a wheel slip minimization algorithm which includes wheel-ground contact angle measurement and a traction control strategy to optimize motion. Thanks to the footage, the human can control the rover with the help of the keyboard to give 0 appropriate directions to it and move it to desired locations. The data is transmitted to Psoc 3 16 which sends instructions to the motors which enable the motion of the wheels. The 9 Mechanam wheels allow the rover to move in any direction without steering only by changing the speeds and rotational directions of the motors. The camera produces high-definition footage because of Global Shutter, having more than 50 megapixels lens and the ability to produce images in raw format. This enables the camera to locate humans in trouble quickly. As soon as the camera spots a human in the area, this data is sent to PSOC 3 1 which then sends commands to the Lidar sensor to scan and map the area. The Lidar sensor sends all this data to the computer along with the coordinates of the humans to notify security forces about 13 rescuing the victims. Additionally, the processing unit sends instructions to the siren, which goes off to let the victims know that they are going to be rescued by security forces soon. 2 In the event of a natural disaster, it is necessary for security forces/weather experts to obtain 3 environmental data to help them manage the situation efficiently. The temperature and humidity sensors on the rover collect relevant data of their surroundings and send it to Psoc 3, which transfers that data to the computer. 7 Suppose scientists want to collect samples from a particular area for further research or the security forces want to examine objects of interest or to detect bombs, they can use the rover's robotic arm to achieve their goal. The user physically interacts with the master end hardware which has current and force sensors that can detect the amount of electrical currents needed to move the robotic arm. The sensors relay this data to the processing unit which can translate this data into electrical signals to 15 program the actuators (motors of the robotic arm). This enables the arm to physically grab and pick up the desired object. Due to a built-in Haptic Feedback System in Psoc 3, the user is allowed to experience the sense of touch when the robotic arm picks up an object. The sensors transmit electrical signals into vibrations to simulate touch to the user. This is mainly how a person can touch and feel an object from a distance. There are times when intended missions need autonomous motion of the rover in difficult terrain, so a path planning algorithm optimizes the path using a genetic algorithm technique. The claims defining the invention are as follows: 1. A rover is equipped with six Mechanam wheels, a robot arm, a camera, sensors and Rocker-Bogie suspension so it can be used not only for handling things but can travel on any kind of terrain. 2. The rover as claimed in claim 1 , is made of composite materials such as fiberglass which is made of strong fibers or fabrics that are stiffened by glue. 3. The rover as claimed in claim 1, has six mechnam wheels attached to the rocker-bogie suspension. The rocker-bogie suspension is designed as a dual wheel system to distribute the load equally. This allows the rover to drive efficiently in rough terrain. The following reveal of the product is a multi-purpose remotely controlled electric rover that utilizes haptic feedback for disaster-management areas which is primarily used by authorities. This patent informs and proposes an approach to help design the rover in a way to scale through a multitude of rough terrains whether irregular, wet, or uneven, to be done so with ease whilst in rescue related operations - this approach is determined based on the wheels, the suspension system, autonomy system and sensors. The proposed rover is a multifunctional device as it can perform various rescue related tasks and research due to the integrated robotic arm that is placed on top of the rover, which gives it the functionality to locate humans and signal for help, at the same time examine various extracted objects from the scene
It does not to be perfect, I just need a draft.
First picture is about the assignment condition,
and another picture is about the product.
Thank you :) 
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock