

Question: I need the solution for part 4 and 5 please Wheel inverted pendulums (WIP) are being widely used for short and rapid mobile transfer applications
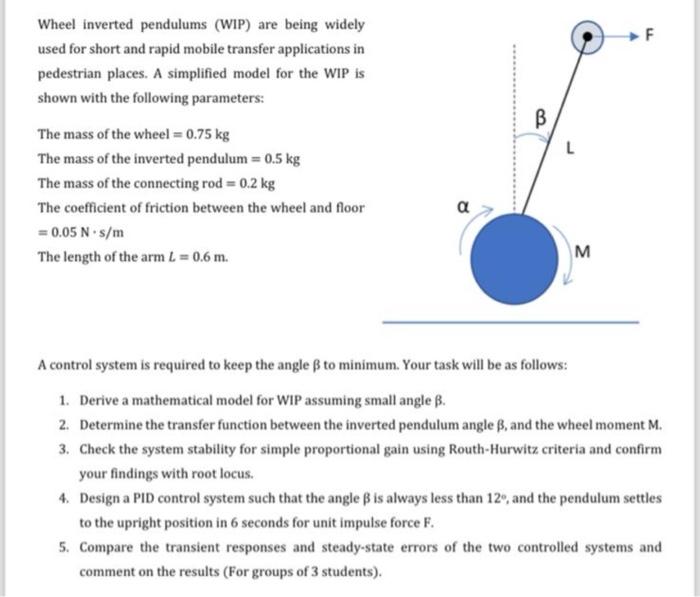
Wheel inverted pendulums (WIP) are being widely used for short and rapid mobile transfer applications in pedestrian places. A simplified model for the WIP is shown with the following parameters: The mass of the wheel =0.75kg The mass of the inverted pendulum =0.5kg The mass of the connecting rod =0.2kg The coefficient of friction between the wheel and floor =0.05Ns/m The length of the armL=0.6m. A control system is required to keep the angle to minimum. Your task will be as follows: 1. Derive a mathematical model for WIP assuming small angle . 2. Determine the transfer function between the inverted pendulum angle , and the wheel moment M. 3. Check the system stability for simple proportional gain using Routh-Hurwitz criteria and confirm your findings with root locus. 4. Design a PID control system such that the angle is always less than 12, and the pendulum settles to the upright position in 6 seconds for unit impulse force F. 5. Compare the transient responses and steady-state errors of the two controlled systems and comment on the results (For groups of 3 students)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts