

Question: - imeun auromaton chan operation, complex interaction with the environment and typically a lack of prior information. A sample open - loop control transfer function
imeun auromaton chan operation, complex interaction with the environment and typically a lack of prior information. A sample openloop control transfer function that characterizes steering angle input to path error output can be written as function
Because is the double pole of the system, the system will be unstable. Therefore, a secondary system function is introduced
which yields a combined system transfer function In Part I, you would discover that the output of the system deviate from the initial input signal, which means there exists errors in lateral trajectory of the autonomous vehicle. In Part II we will introduce a PID controller with transfer function
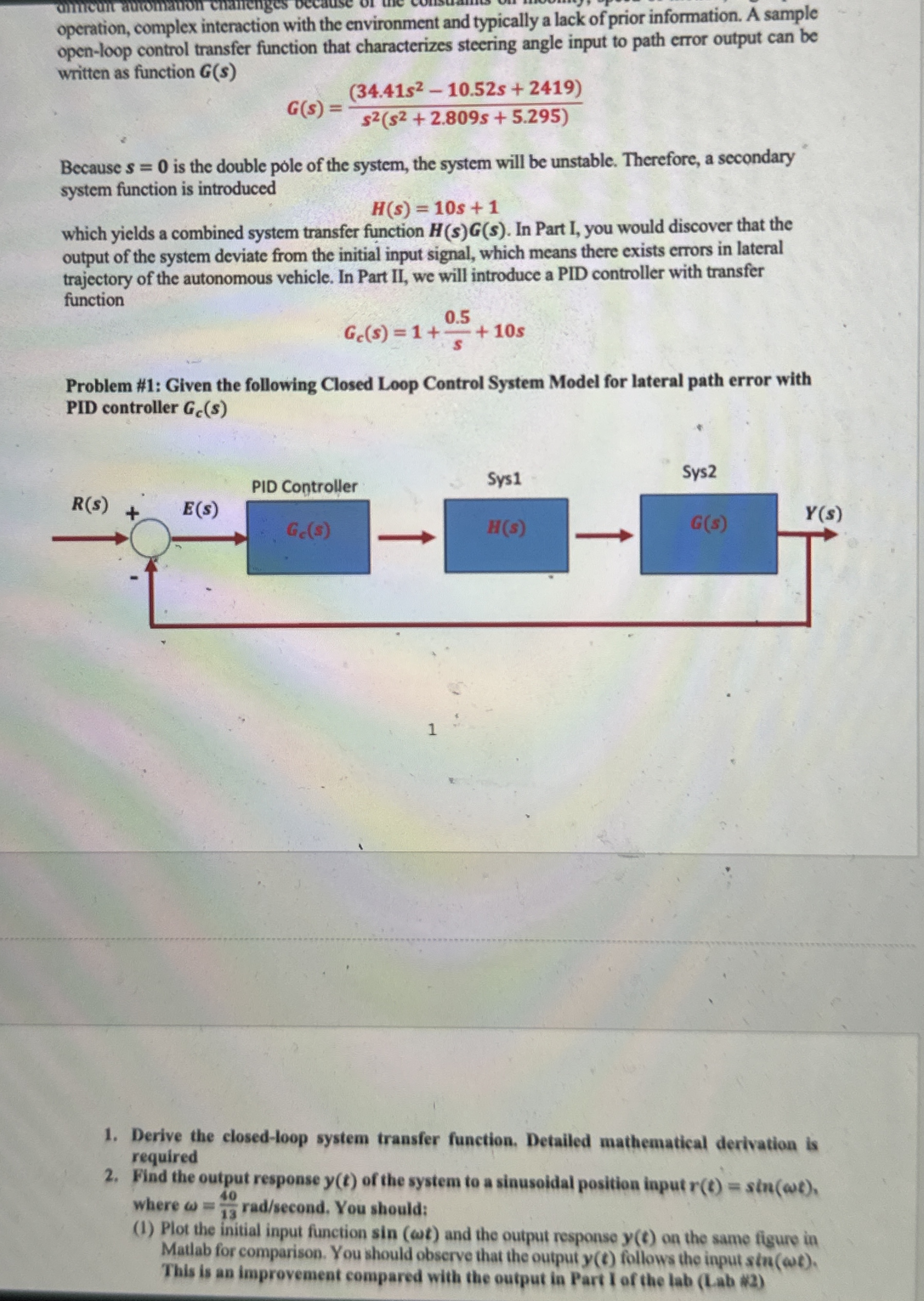
Problem #: Given the following Closed Loop Control System Model for lateral path error with PID controller
Derive the closedloop system transfer function. Detailed mathematical derivation is required
Find the output response of the system to a sinusoidal position input where You should:
Plot the initial input function and the output response on the same figure in Matlab for comparison. You should observe that the output follows the input This is an improvement compared with the output in Part il of the lab tab
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock