

Question: Implement a fourth - order Runge - Kutta method that integrates the system y = f ( y ) from t = 0 to t
Implement a fourthorder RungeKutta method that integrates the system from
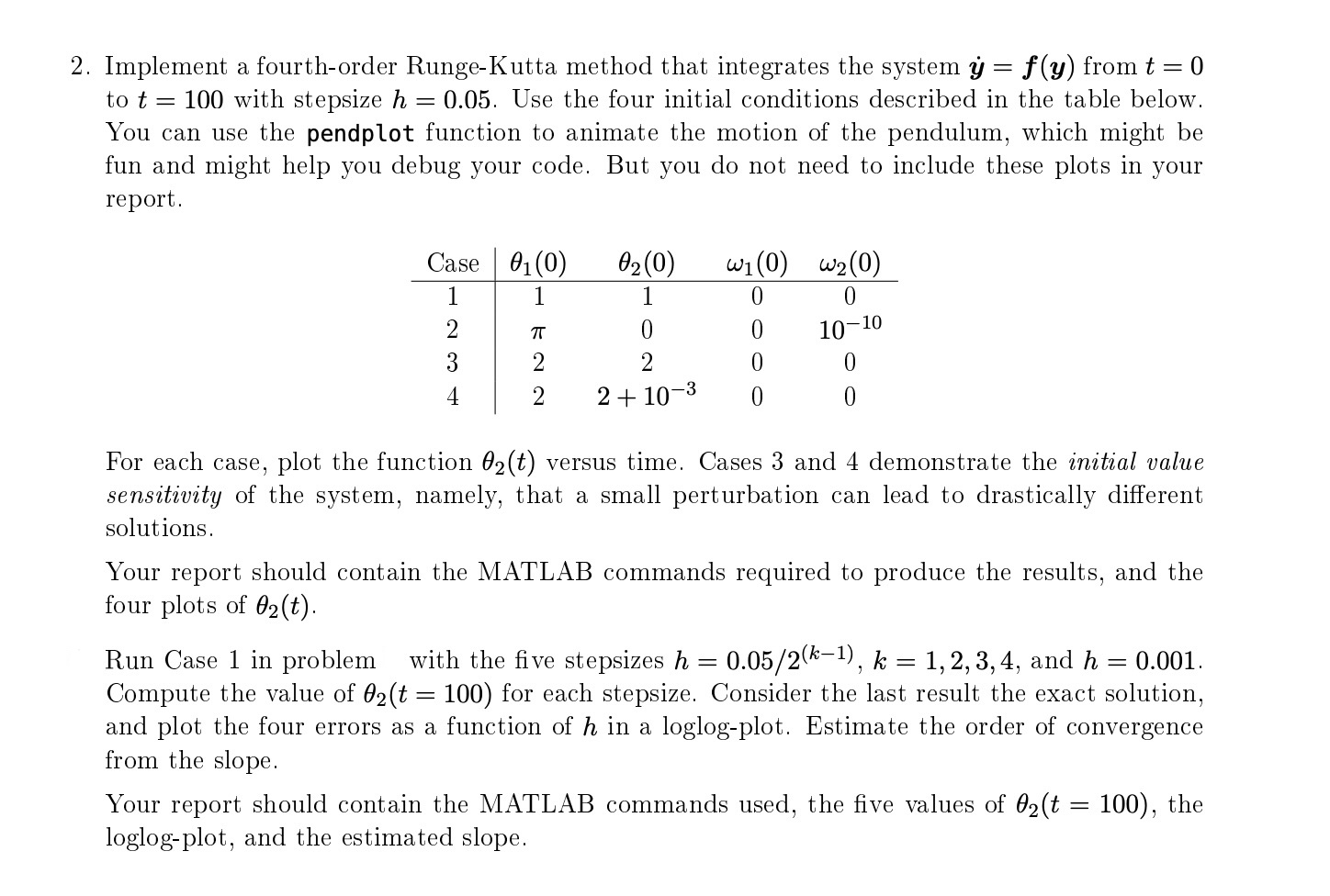
to with stepsize Use the four initial conditions described in the table below.
You can use the pendplot function to animate the motion of the pendulum, which might be
fun and might help you debug your code. But you do not need to include these plots in your
report.
For each case, plot the function versus time. Cases and demonstrate the initial value
sensitivity of the system, namely, that a small perturbation can lead to drastically different
solutions.
Your report should contain the MATLAB commands required to produce the results, and the
four plots of
Run Case in problem with the five stepsizes and
Compute the value of for each stepsize. Consider the last result the exact solution,
and plot the four errors as a function of in a loglogplot. Estimate the order of convergence
from the slope.
Your report should contain the MATLAB commands used, the five values of the
loglogplot, and the estimated slope.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock