

Question: implement some code that performs calibration using the by t?rst compt?ng a projection matrix, and then decomposing that matrix to find the extrinsic and intrinsic
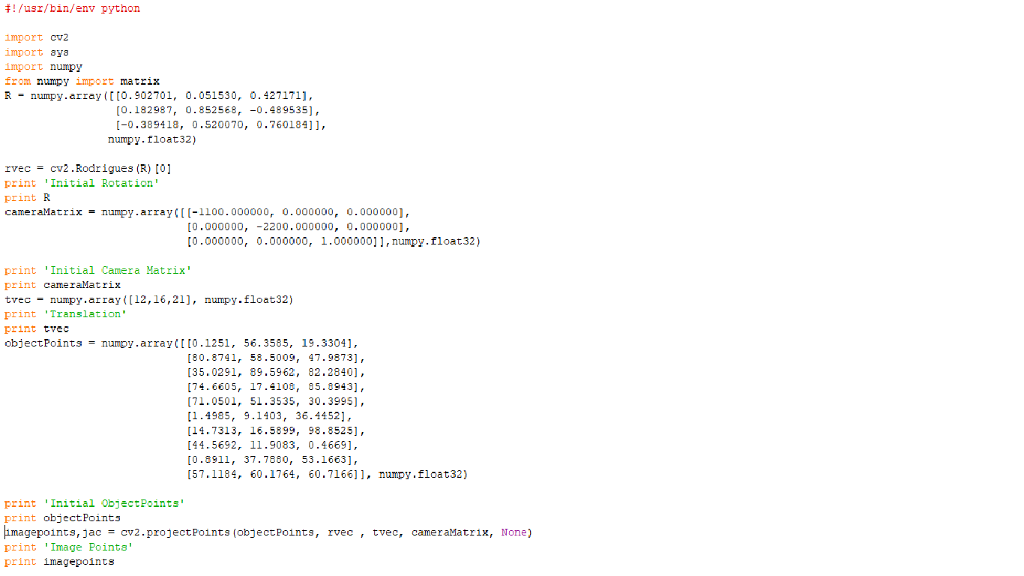
implement some code that performs calibration using the by t?rst compt?ng a projection matrix, and then decomposing that matrix to find the extrinsic and intrinsic camera parameters. This program takes ten given 3d points and projects them into a 2d image using the given supplied camera calibration matrix, rotation matrix and translation vector. Your goal is to write the two routines that are missing, which are computeprojectionmatrix and decomposeprojectionmatrix It should be the case that the computed camera matrix, rotation matrix and translation vector are the same (or very similar) to the original versions that were used to create the projected points. implement some code that performs calibration using the by t?rst compt?ng a projection matrix, and then decomposing that matrix to find the extrinsic and intrinsic camera parameters. This program takes ten given 3d points and projects them into a 2d image using the given supplied camera calibration matrix, rotation matrix and translation vector. Your goal is to write the two routines that are missing, which are computeprojectionmatrix and decomposeprojectionmatrix It should be the case that the computed camera matrix, rotation matrix and translation vector are the same (or very similar) to the original versions that were used to create the projected points
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts