

Question: In a search algorithm, an OpenList (a.k.a. Frontiers) is a data structure that saves the nodes to be explored. When the destination is reached during

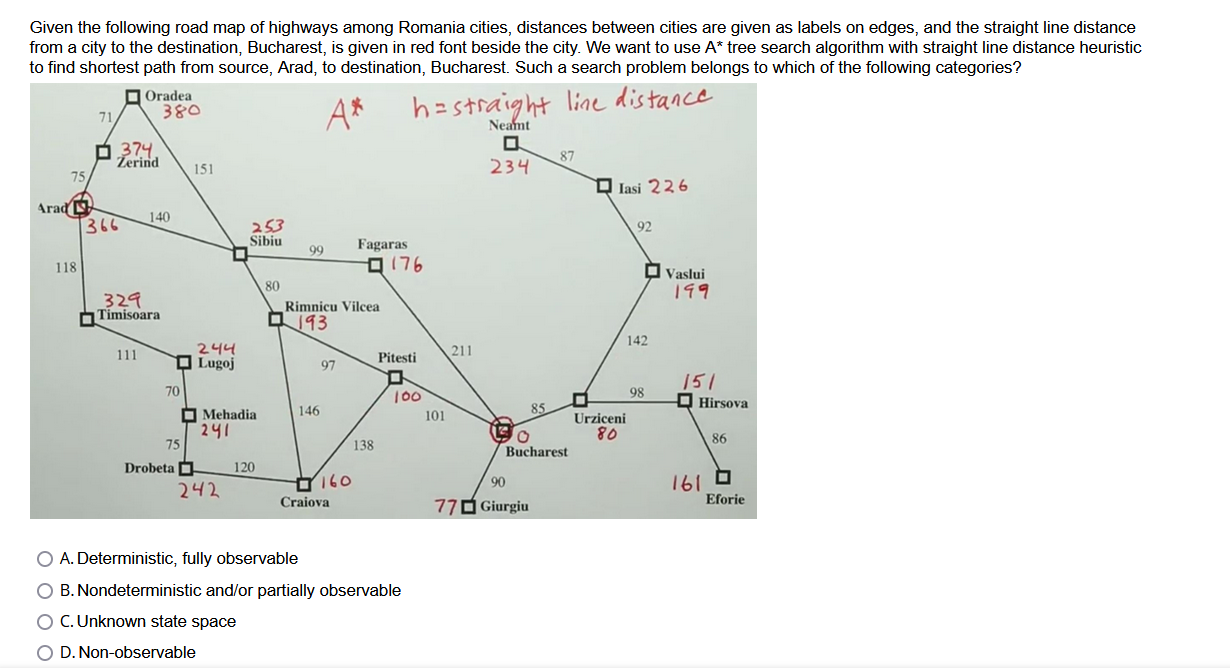
In a search algorithm, an OpenList (a.k.a. Frontiers) is a data structure that saves the nodes to be explored. When the destination is reached during the search process, what is the correct condition to terminate the search? A. When the destination is added into OpenList B. When the destination is popped from OpenList C. When a predetermined number of nodes have been expanded D. When every node in the search tree or graph has been explored Given the following road map of highways among Romania cities, distances between cities are given as labels on edges, and the straight line distance from a city to the destination, Bucharest, is given in red font beside the city. We want to use A tree search algorithm with straight line distance heuristic to find shortest path from source, Arad, to destination, Bucharest. Such a search problem belongs to which of the following categories? A. Deterministic, fully observable B. Nondeterministic and/or partially observable C. Unknown state space D. Non-observable
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts