

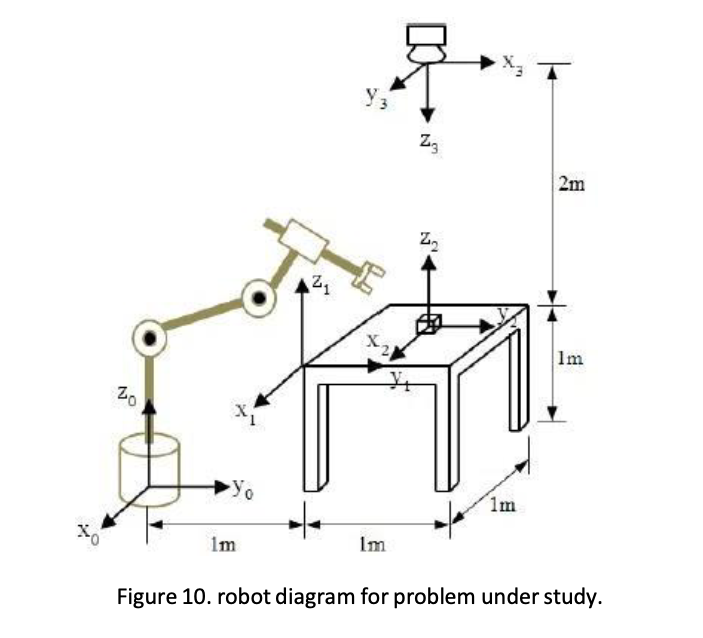
Question: In Figure 1 0 , coordinate frames are attached to the base of robot arm, table corner, workpiece, and camera with positions and orientations as
In Figure coordinate frames are attached to the base of robot arm, table corner, workpiece, and camera with positions and orientations as shown. The workpiece is a cube object with size xx cm and is attached at the cube centre. The camera is mounted directly on top of the cube at height meters.
From Figure suppose the block on the table is rotated degree about z and moved so that its center has coordinate T relative to the frame Compute the homogeneous transformation relating the block frame to the camera frame, and the block frame to the base frame.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock