

Question: In python language pls Challenge question: Write a function that evaluates the geometry of a 2-link planar robot arm and plot it. (Don't bother trying
In python language pls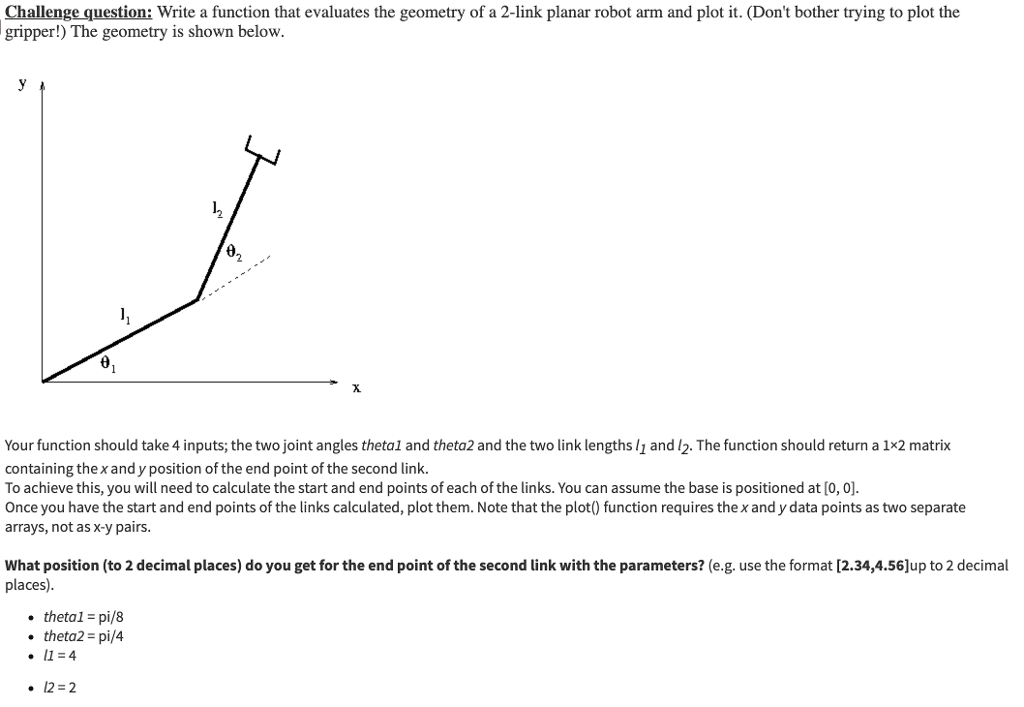
Challenge question: Write a function that evaluates the geometry of a 2-link planar robot arm and plot it. (Don't bother trying to plot the gripper!) The geometry is shown below. 92 Your function should take 4 inputs; the two joint angles thetal and theta2 and the two link lengths l 1 and l2. The function should return a 1x2 matrix containing thex and y position of the end point of the second link. To achieve this, you will need to calculate the start and end points of each of the links. You can assume the base is positioned at [O, 0] Once you have the start and end points of the links calculated, plot them. Note that the plot) function requires the x and y data points as two separate arrays, not as x-y pairs. What position (to 2 decimal places) do you get for the end point of the second link with the parameters? (e.g. use the format [2.34,4.56]up to 2 decimal places). theta1- pi/8 theta2 pi4 11-4 12-2
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts