

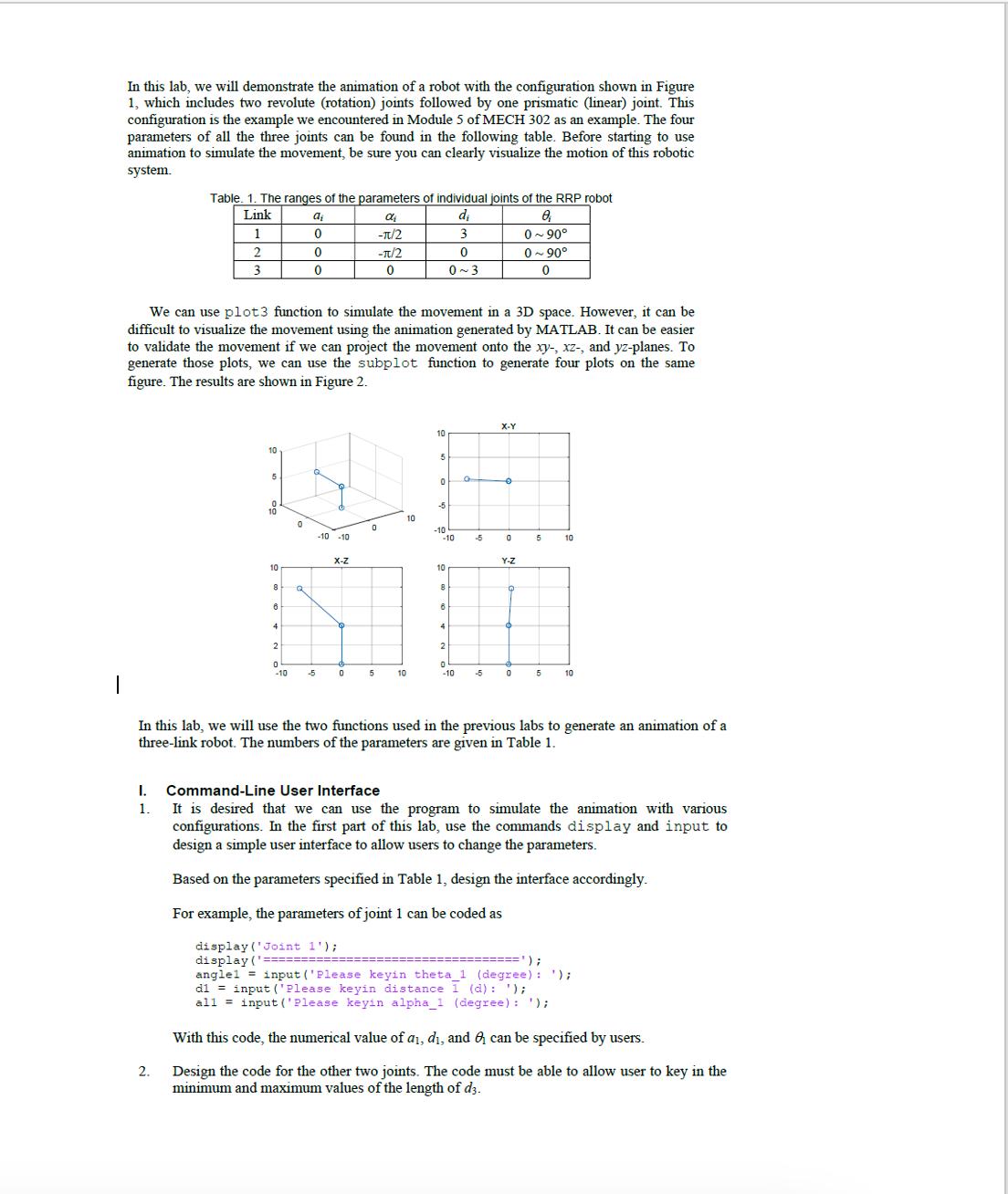
In this lab, we will demonstrate the animation of a robot with the configuration shown in...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:
Here is the code to design a simple commandline user interface to allow users to change the paramete... View the full answer

Related Book For 
Income Tax Fundamentals 2013
ISBN: 9781285586618
31st Edition
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
Posted Date:
