

Question: In this problem, we will linearly approximate the value of a state in a task given different kinds of feature representation. Notice that the weights
In this problem, we will linearly approximate the value of a state in a task given different kinds of feature representation. Notice that the weights for features will be given.
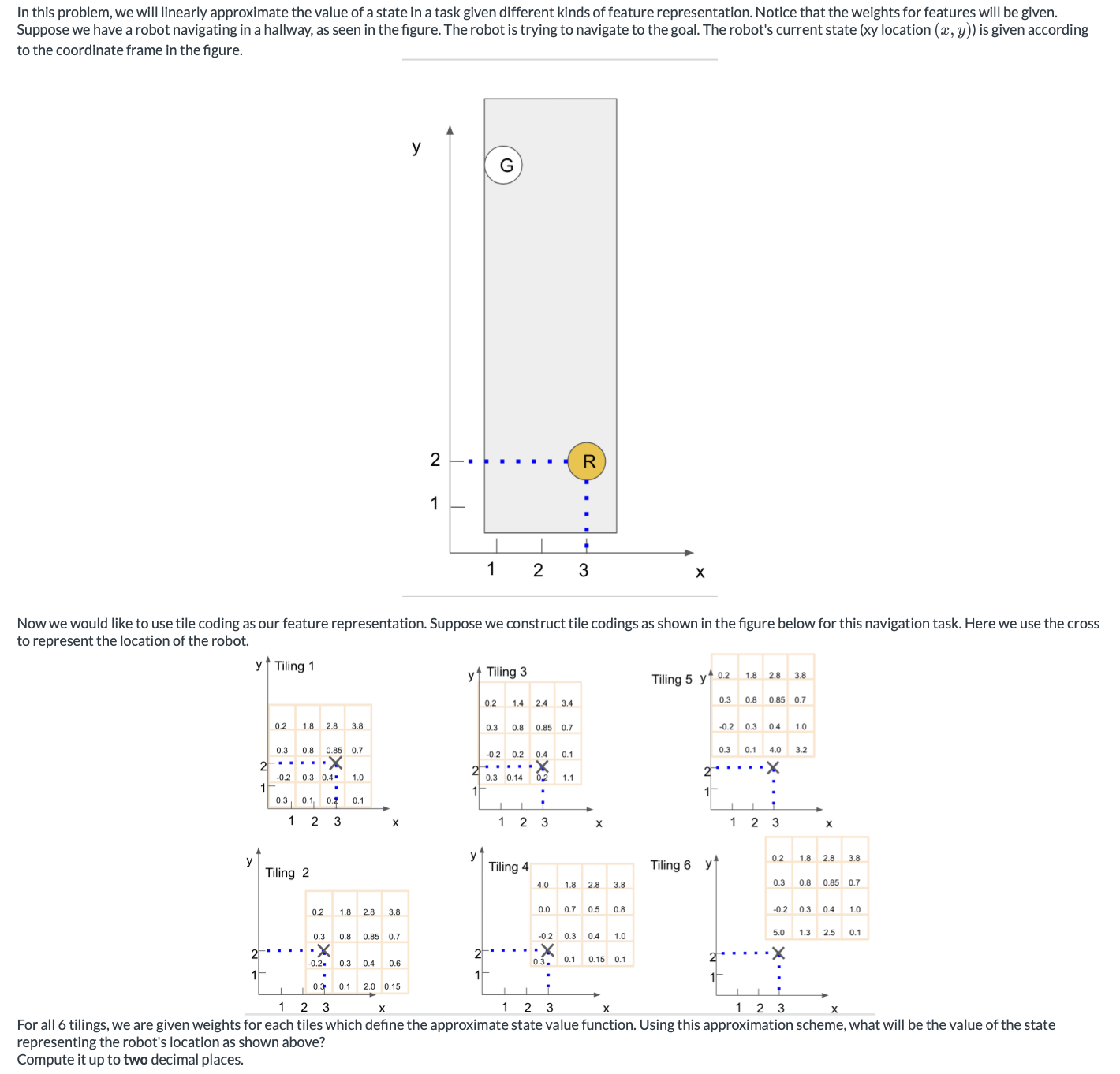
Suppose we have a robot navigating in a hallway, as seen in the figure. The robot is trying to navigate to the goal. The robot's current state xy location is given according
to the coordinate frame in the figure.
Now we would like to use tile coding as our feature representation. Suppose we construct tile codings as shown in the figure below for this navigation task. Here we use the cross
to represent the location of the robot.
Tilit
For all tilings, we are given weights for each tiles which define the approximate state value function. Using this approximation scheme, what will be the value of the state
representing the robot's location as shown above?
Compute it up to two decimal places.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock