

Question: In this problem you shall derive and test discrete time controllers. You shall get the controllers by a step response experiment on Simulink, and by
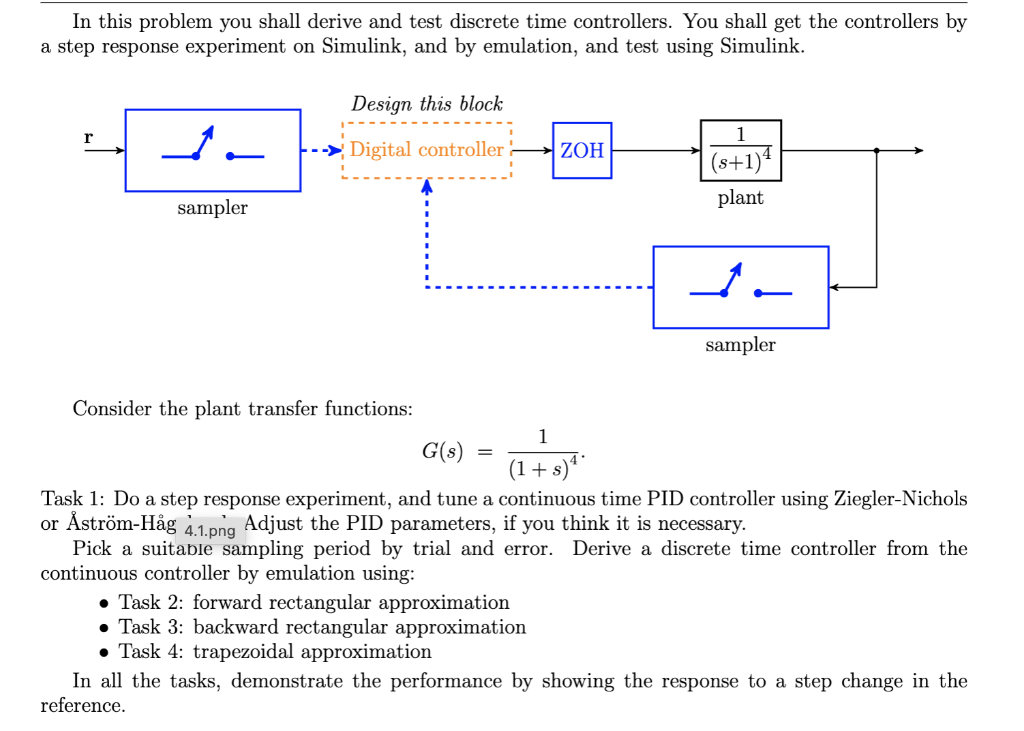
In this problem you shall derive and test discrete time controllers. You shall get the controllers by a step response experiment on Simulink, and by emulation, and test using Simulink. Design this block r 1 Digital controller ZOH 1 (s+1) plant sampler sampler Consider the plant transfer functions: 1 G(s) (1+8)4" Task 1: Do a step response experiment, and tune a continuous time PID controller using Ziegler-Nichols or strm-Hg 4.1.png Adjust the PID parameters, if you think it is necessary. Pick a suitable sampling period by trial and error. Derive a discrete time controller from the continuous controller by emulation using: Task 2: forward rectangular approximation Task 3: backward rectangular approximation Task 4: trapezoidal approximation In all the tasks, demonstrate the performance by showing the response to a step change in the reference. = Consider the plant transfer functions: 1 G(S) (1 + 8)4" Task 1: Do a step response experiment, and tune a continuous time PID controller using Ziegler-Nichols or strm-Hgglund. Adjust the PID parameters, if you think it is necessary. Pick a suitable sampling period by trial and error. Derive a discrete time controller from the continuous controller by emulation using: Task 2: forward rectangular approximation Task 3: backward rectangular approximation Task 4: trapezoidal approximation In all the tasks, demonstrate the performance by showing the response to a step change in the reference. In this problem you shall derive and test discrete time controllers. You shall get the controllers by a step response experiment on Simulink, and by emulation, and test using Simulink. Design this block r 1 Digital controller ZOH 1 (s+1) plant sampler sampler Consider the plant transfer functions: 1 G(s) (1+8)4" Task 1: Do a step response experiment, and tune a continuous time PID controller using Ziegler-Nichols or strm-Hg 4.1.png Adjust the PID parameters, if you think it is necessary. Pick a suitable sampling period by trial and error. Derive a discrete time controller from the continuous controller by emulation using: Task 2: forward rectangular approximation Task 3: backward rectangular approximation Task 4: trapezoidal approximation In all the tasks, demonstrate the performance by showing the response to a step change in the reference. = Consider the plant transfer functions: 1 G(S) (1 + 8)4" Task 1: Do a step response experiment, and tune a continuous time PID controller using Ziegler-Nichols or strm-Hgglund. Adjust the PID parameters, if you think it is necessary. Pick a suitable sampling period by trial and error. Derive a discrete time controller from the continuous controller by emulation using: Task 2: forward rectangular approximation Task 3: backward rectangular approximation Task 4: trapezoidal approximation In all the tasks, demonstrate the performance by showing the response to a step change in the reference
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts