

Question: k ( m ) / ( s ) , Y _ ( Q ) ^ ( ) = + 3 k ( m ) /
kmsYQkms
deg,theta degs
: theta degs
deg,theta degs
:I: theta degs
kmrkms
deg phi degs
: : mkm
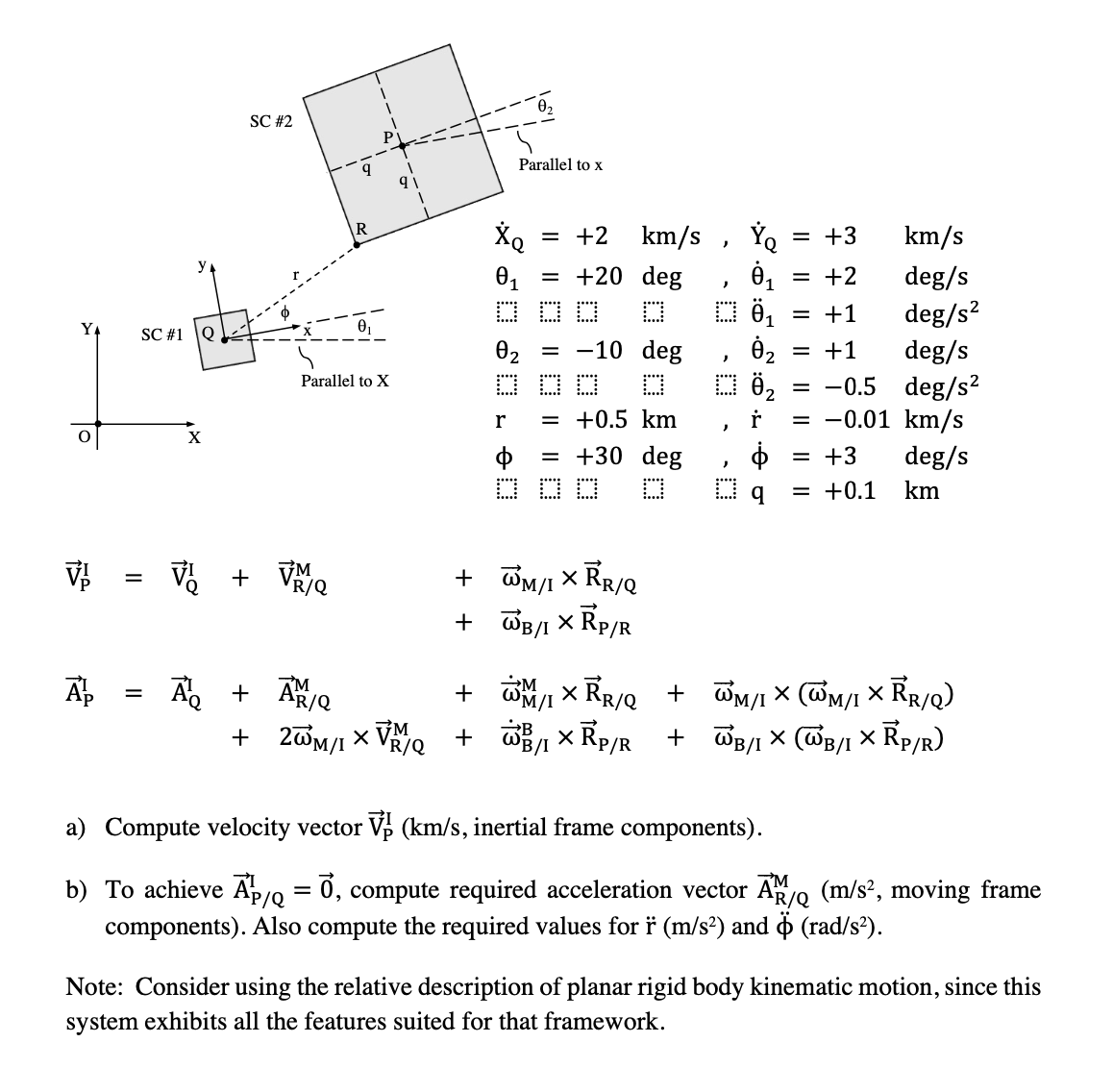
vecVPIvecVQIvecVRQMvecomega MItimes vecRRQ
vecomega BItimes vecRPR
vecAPIvecAQIvecARQMvecomega MIMtimes vecRRQvecomega MItimes vecomega MItimes vecRRQ
vecomega MItimes vecVRMMvecomega BIBtimes vecRPRvecomega BItimes vecomega BItimes vecRPR
avecVPPkms inertial frame componentsvecAPQvec compute required acceleration vector moving frame componentsrms and phi rads
Note: Consider using the relative description of planar rigid body kinematic motion, since this system exhibits all the features suited for that framework.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock