

Question: Lagrange ( 4 0 pts ) - Using Lagrangian techniques, find the necessary expressions of torque for each joint of the Robot Arm shown in
Lagrange pts Using Lagrangian techniques, find the necessary expressions of torque for
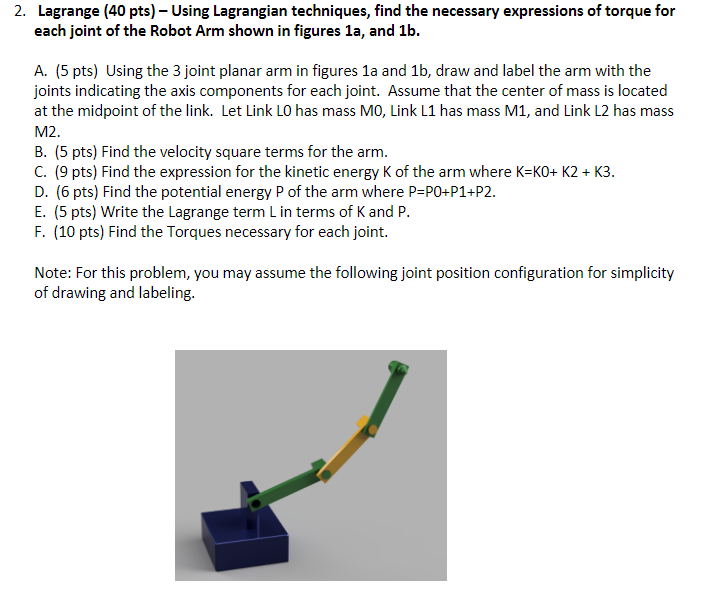
each joint of the Robot Arm shown in figures a and
A pts Using the joint planar arm in figures a and draw and label the arm with the
joints indicating the axis components for each joint. Assume that the center of mass is located
at the midpoint of the link. Let Link L has mass M Link L has mass M and Link L has mass
M
B pts Find the velocity square terms for the arm.
C pts Find the expression for the kinetic energy of the arm where
D pts Find the potential energy of the arm where
E pts Write the Lagrange term in terms of and
F pts Find the Torques necessary for each joint.
Note: For this problem, you may assume the following joint position configuration for simplicity
of drawing and labeling.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock