

Question: Let J ( ) : R n R p be the Jacobian of a manipulator ( p = 3 or . Assume that a task
Let : be the Jacobian of a manipulator or
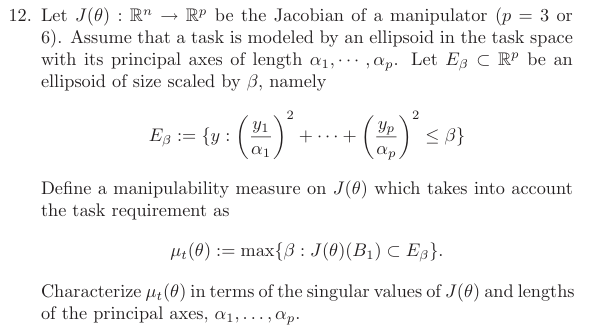
Assume that a task is modeled by an ellipsoid in the task space
with its principal axes of length cdots, Let be an
ellipsoid of size scaled by namely
::cdots
Define a manipulability measure on which takes into account
the task requirement as
:max:
Characterize in terms of the singular values of and lengths
of the principal axes, dots,
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock