

Question: Let's consider a stereo camera rig with the world origin at the first camera. The second camera is translated by tx along the x-axis
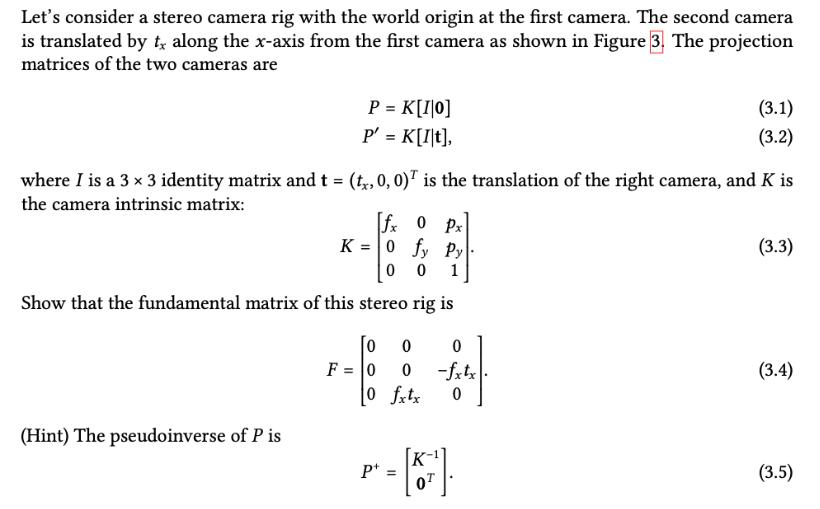
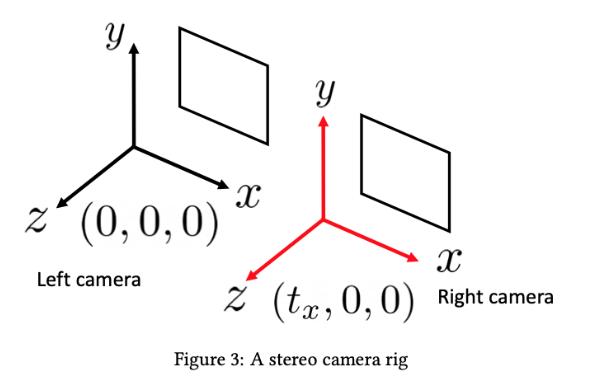
Let's consider a stereo camera rig with the world origin at the first camera. The second camera is translated by tx along the x-axis from the first camera as shown in Figure 3. The projection matrices of the two cameras are P = K[10] P' = K[I\t], where I is a 3 x 3 identity matrix and t = (tx, 0, 0) is the translation of the right camera, and K is the camera intrinsic matrix: fx 0 Px K=0 fy Py 00 1 Show that the fundamental matrix of this stereo rig is (Hint) The pseudoinverse of P is [o F = 0 0 0 0 fxtx 0 -fxtx 0 (3.1) (3.2) P - [K]. = (3.3) (3.4) (3.5) Y z (0, 0, 0) Left camera X Y X z (tx, 0, 0) Right camera Figure 3: A stereo camera rig
Step by Step Solution
3.55 Rating (155 Votes )
There are 3 Steps involved in it
Step 1 The fundamental matrix is defined as F invP invP where P is the projecti... View full answer

Get step-by-step solutions from verified subject matter experts