

Question: link position sensor cross roller bearing power conventer unit -joint and motor controller boand power supply torque sensor with digital interface Harmonie Drive gear
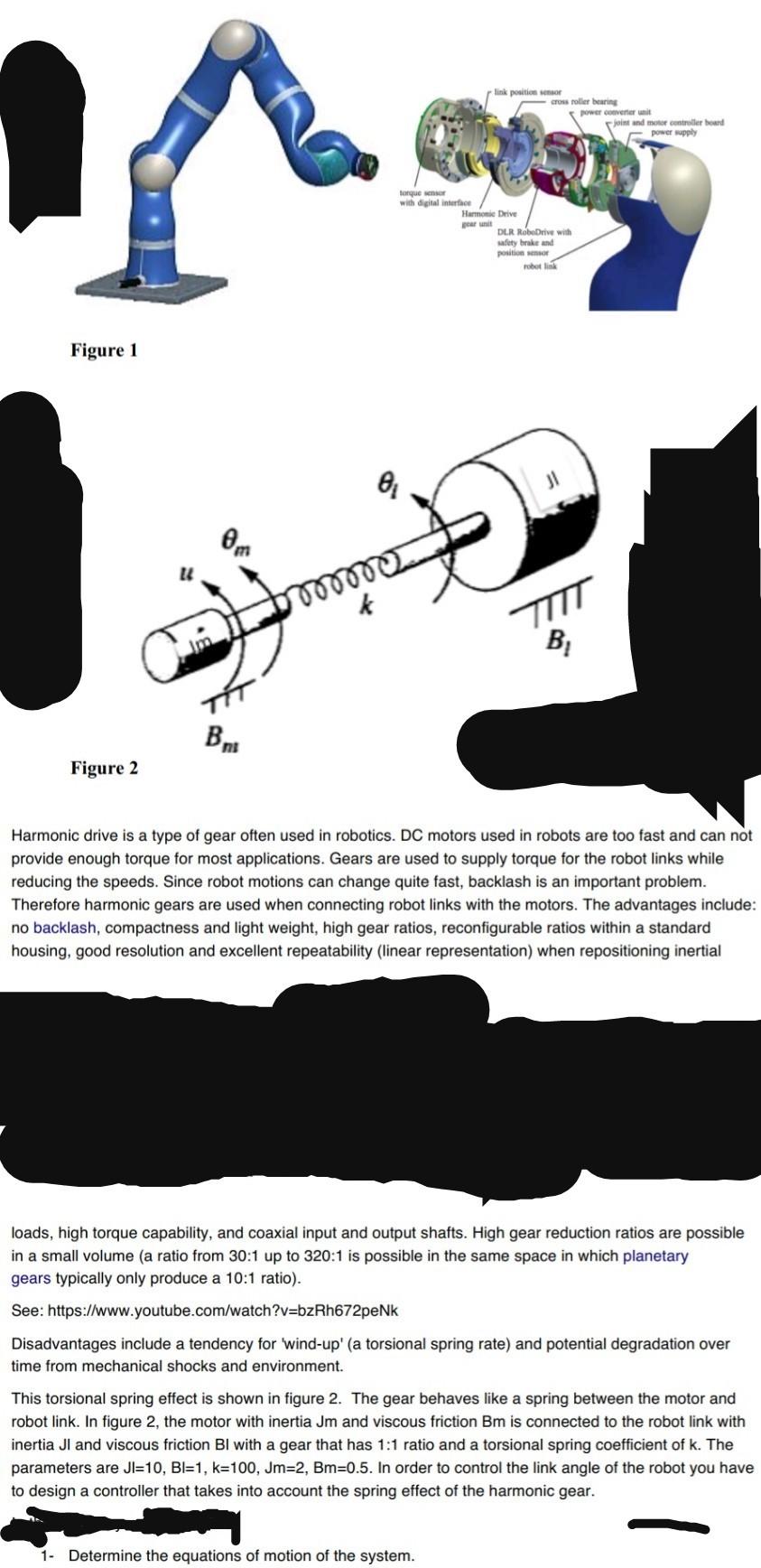
link position sensor cross roller bearing power conventer unit -joint and motor controller boand power supply torque sensor with digital interface Harmonie Drive gear unit DLR RoboDrive with safety brake and position senson robot link Figure 1 TITT B, wellllll Bn Figure 2 Harmonic drive is a type of gear often used in robotics. DC motors used in robots are too fast and can not provide enough torque for most applications. Gears are used to supply torque for the robot links while reducing the speeds. Since robot motions can change quite fast, backlash is an important problem. Therefore harmonic gears are used when connecting robot links with the motors. The advantages include: no backlash, compactness and light weight, high gear ratios, reconfigurable ratios within a standard housing, good resolution and excellent repeatability (linear representation) when repositioning inertial loads, high torque capability, and coaxial input and output shafts. High gear reduction ratios are possible in a small volume (a ratio from 30:1 up to 320:1 is possible in the same space in which planetary gears typically only produce a 10:1 ratio). See: https://www.youtube.com/watch?v=bzRh672peNk Disadvantages include a tendency for wind-up' (a torsional spring rate) and potential degradation over time from mechanical shocks and environment. This torsional spring effect is shown in figure 2. The gear behaves like a spring between the motor and robot link. In figure 2, the motor with inertia Jm and viscous friction Bm is connected to the robot link with inertia JI and viscous friction Bl with a gear that has 1:1 ratio and a torsional spring coefficient of k. The parameters are JI=10, BI=1, k=100, Jm=2, Bm=0.5. In order to control the link angle of the robot you have to design a controller that takes into account the spring effect of the harmonic gear. 1- Determine the equations of motion of the system.
Step by Step Solution
3.36 Rating (152 Votes )
There are 3 Steps involved in it
To determine the equations of motion of the system shown in Figure 2 follow these steps System Descr... View full answer

Get step-by-step solutions from verified subject matter experts