

Question: ***Matlab software needs to be used*** Consider the dynamics of a particle of massm sliding on a frictionless ring of radiusr see Figure below The
***Matlab software needs to be used***
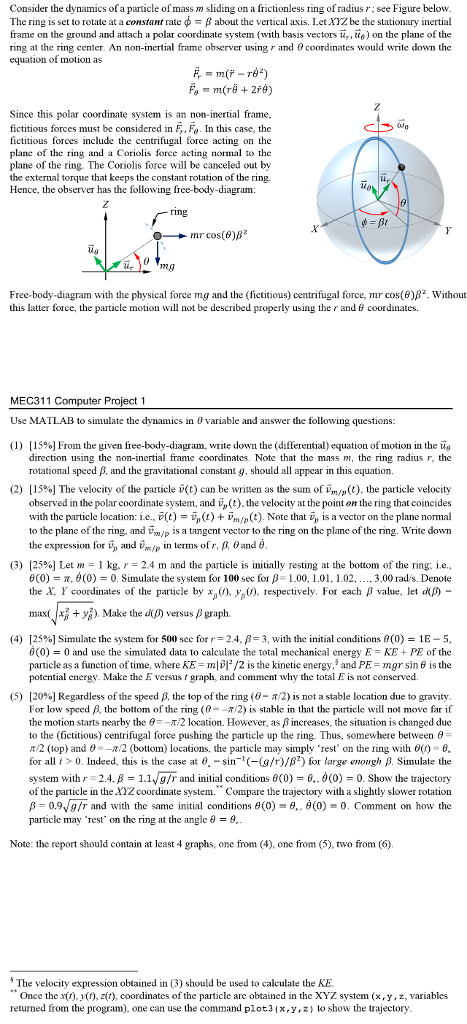
Consider the dynamics of a particle of massm sliding on a frictionless ring of radiusr see Figure below The ring is set to rotate at a constant rate about the vertical axis. Let XYZ be the stationary inertial frame on the ground and attach polar coordinate system (with basis vectors i, uo) on the plane of the ring at the ring center. An non-inertial frame observer using r and coordinates would write down the equation of motion as Since this polar coordinate system is an non-inertial frame fictitious forces must be considered in F,F. In this case, the fictitious forces include the centrifugal force acting on the plane of the ring and a Coriolis force acting normal to the plane of the ring. The Coriolis force will be canceled out by the external torque that keeps the constant rotation of the ring. Hence, the observer has the following free-body-diagram ttr ring YF Free-body-diagram with the physical force mg and the (ictious) centrifugal force, mr cos()B. Without this latter force, the particle motion will not be described properly using the r and coordinates. MEC311 Computer Project 1 Use MATLAB to simulate the dynanics in variable and answer the following questions: (1) [1 5%) From the given free-body-diagram, write down the (differential) equation of motion in the direction using the non-inertial frame coordinates. Note that the mass m, the ring radius r rotational speed , and the gravitational constant g, should all appear in this equation. observed in the polar coordinate system, and v, (t), the velocity at the point on the ring that coincides the expression for tip and Vm/p in terms of r, , and 6(0) = . (0)-0. Simulate the system for 100 sec for 1.00. 1.01, 1.02, 3.00 rads. Denote (2) [1596] The velocity of the particle v(t) can be written as the sum of v / (t)the particle velocity with the particle location: ie., 7(t) -v,(t) + vm(). Note that y is a vector on the plane normal to the plane of the ring, an /p is a tangent vector to the ring on the plane of the ring. Write down (3) [25%) Let m = 1 kg. r = 2.4 m and the particle is initially resting at the bottom of the ring: ie. the X. Y coordinates of the particle by xn(t), yp(1), respectively. For each value, let d(- max(J + yp. Make the d(p) versus graph. [25%) Simulate the system for 500 sec for r= 2.4, = 3, with the initial conditions (0) = 1E-5, 6(0) = 0 and use the simulated data to calculate te total mechanical energy E = KE + PE of the particle as a function of time, where KE-m1v12/2 is the kinetic energy.* and PE-mgr sin is the potential energy. Make the E versus t graph, and comment why the total E is not conserved. [20%] Regardless of the speed , the top of the ring (0-:2) is not a stable location due to gravity For low speed , the bottom of the ring (=-72) is stable in that the particle will not move far if the motion starts nearby the --TA2 location. However, as increases, the situation is changed due to the (fictitious) centrifugal force pushing the particle up the ring. Thus, somewhere between m2 (top) and --X 2 (bottom) locations, the particle may simply est, on the ling with ()-6 for all t > 0. Indeed, this is the case at .-sin-i (-(g/r)/*) for large enough . Simulate the (4) (5) system with r-24, -1.1/g/r and initial conditions (0)-6. (0)-0. Show the trajectory of the particle in the XYZ coordinate system." Compare the trajectory with a slightly slower rotation -09Vg/r and with the same initial conditions (0)-A, (0) = 0. Comment on how the particle may Test' on the ring at the angle = Note: the report should contain at least 4 graphs, one from (4), one from (5), two from (6) The velocity expression obtained in (3) should be used to calculate the KE Once the x(r) V(r), zlf), coordinates of the particle are obtained in the XYZ system (x,y,z, variables returned fiom the program), one can use the command plot31x,y,z) to show the trajectory Consider the dynamics of a particle of massm sliding on a frictionless ring of radiusr see Figure below The ring is set to rotate at a constant rate about the vertical axis. Let XYZ be the stationary inertial frame on the ground and attach polar coordinate system (with basis vectors i, uo) on the plane of the ring at the ring center. An non-inertial frame observer using r and coordinates would write down the equation of motion as Since this polar coordinate system is an non-inertial frame fictitious forces must be considered in F,F. In this case, the fictitious forces include the centrifugal force acting on the plane of the ring and a Coriolis force acting normal to the plane of the ring. The Coriolis force will be canceled out by the external torque that keeps the constant rotation of the ring. Hence, the observer has the following free-body-diagram ttr ring YF Free-body-diagram with the physical force mg and the (ictious) centrifugal force, mr cos()B. Without this latter force, the particle motion will not be described properly using the r and coordinates. MEC311 Computer Project 1 Use MATLAB to simulate the dynanics in variable and answer the following questions: (1) [1 5%) From the given free-body-diagram, write down the (differential) equation of motion in the direction using the non-inertial frame coordinates. Note that the mass m, the ring radius r rotational speed , and the gravitational constant g, should all appear in this equation. observed in the polar coordinate system, and v, (t), the velocity at the point on the ring that coincides the expression for tip and Vm/p in terms of r, , and 6(0) = . (0)-0. Simulate the system for 100 sec for 1.00. 1.01, 1.02, 3.00 rads. Denote (2) [1596] The velocity of the particle v(t) can be written as the sum of v / (t)the particle velocity with the particle location: ie., 7(t) -v,(t) + vm(). Note that y is a vector on the plane normal to the plane of the ring, an /p is a tangent vector to the ring on the plane of the ring. Write down (3) [25%) Let m = 1 kg. r = 2.4 m and the particle is initially resting at the bottom of the ring: ie. the X. Y coordinates of the particle by xn(t), yp(1), respectively. For each value, let d(- max(J + yp. Make the d(p) versus graph. [25%) Simulate the system for 500 sec for r= 2.4, = 3, with the initial conditions (0) = 1E-5, 6(0) = 0 and use the simulated data to calculate te total mechanical energy E = KE + PE of the particle as a function of time, where KE-m1v12/2 is the kinetic energy.* and PE-mgr sin is the potential energy. Make the E versus t graph, and comment why the total E is not conserved. [20%] Regardless of the speed , the top of the ring (0-:2) is not a stable location due to gravity For low speed , the bottom of the ring (=-72) is stable in that the particle will not move far if the motion starts nearby the --TA2 location. However, as increases, the situation is changed due to the (fictitious) centrifugal force pushing the particle up the ring. Thus, somewhere between m2 (top) and --X 2 (bottom) locations, the particle may simply est, on the ling with ()-6 for all t > 0. Indeed, this is the case at .-sin-i (-(g/r)/*) for large enough . Simulate the (4) (5) system with r-24, -1.1/g/r and initial conditions (0)-6. (0)-0. Show the trajectory of the particle in the XYZ coordinate system." Compare the trajectory with a slightly slower rotation -09Vg/r and with the same initial conditions (0)-A, (0) = 0. Comment on how the particle may Test' on the ring at the angle = Note: the report should contain at least 4 graphs, one from (4), one from (5), two from (6) The velocity expression obtained in (3) should be used to calculate the KE Once the x(r) V(r), zlf), coordinates of the particle are obtained in the XYZ system (x,y,z, variables returned fiom the program), one can use the command plot31x,y,z) to show the trajectory
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts