

Question: need a really clear answer thank you 1 Camera Parameters [50% Figure 1: lustration of Euler angles. 1. Rotation matrix [10%) As shown in Fig.
 need a really clear answer thank you
need a really clear answer thank you
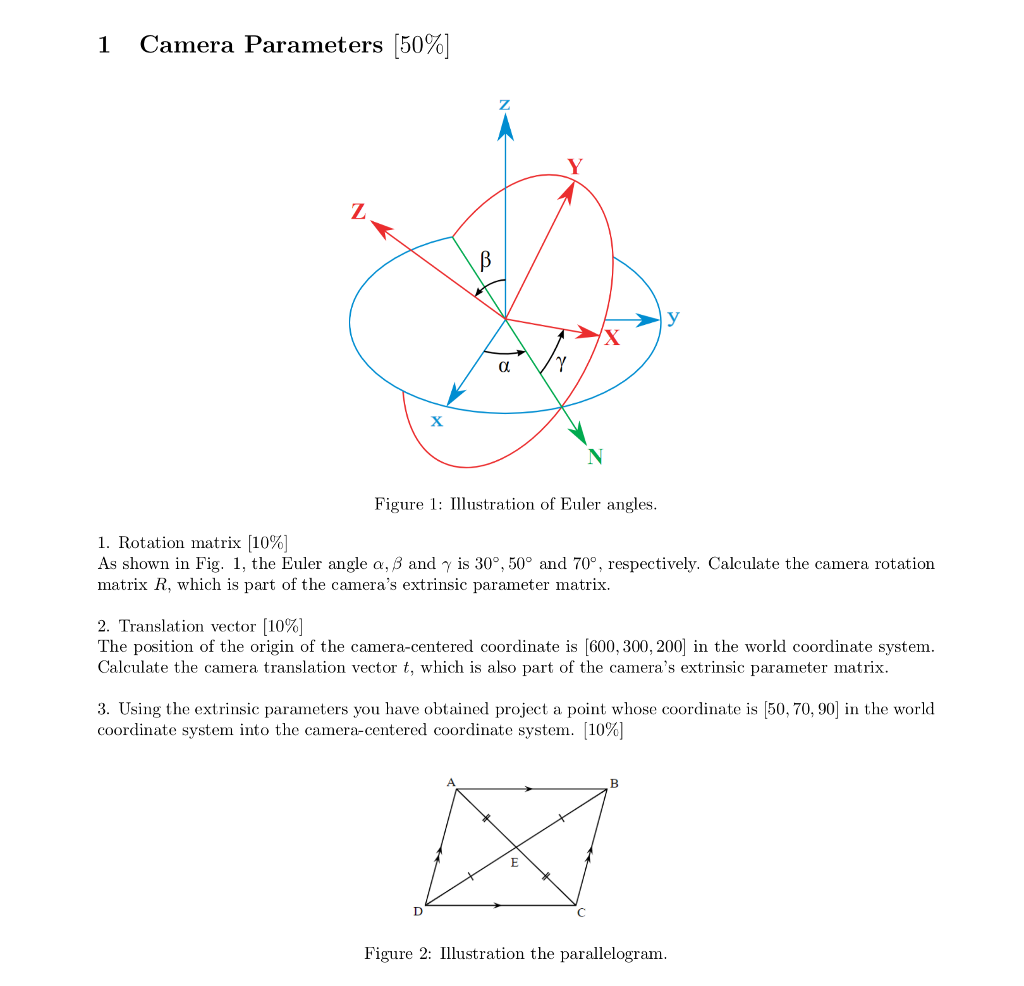
1 Camera Parameters [50% Figure 1: lustration of Euler angles. 1. Rotation matrix [10%) As shown in Fig. 1, the Euler angle , and is 30, 50 and 70%, respectively. Calculate the camera rotation matrix R, which is part of the camera's extrinsic parameter matrix. 2. Translation vector [10%) The position of the origin of the camera-centered coordinate is [600, 300, 200 in the world coordinate system. Calculate the camera translation vector t, which is also part of the camera's extrinsic parameter matrix. 3. Using the extrinsic parameters you have obtained project a point whose coordinate is [50, 70, 90] in the world coordinate system into the camera-centered coordinate system. [10%) Figure 2: Illustration the parallelogram 1 Camera Parameters [50% Figure 1: lustration of Euler angles. 1. Rotation matrix [10%) As shown in Fig. 1, the Euler angle , and is 30, 50 and 70%, respectively. Calculate the camera rotation matrix R, which is part of the camera's extrinsic parameter matrix. 2. Translation vector [10%) The position of the origin of the camera-centered coordinate is [600, 300, 200 in the world coordinate system. Calculate the camera translation vector t, which is also part of the camera's extrinsic parameter matrix. 3. Using the extrinsic parameters you have obtained project a point whose coordinate is [50, 70, 90] in the world coordinate system into the camera-centered coordinate system. [10%) Figure 2: Illustration the parallelogram
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts